Inscription / Connexion Nouveau Sujet
DM Mathématiques 3ième sur la géométrie
Bonjour, j'ai un DM en mathématiques de niveau 3ième, j'suis bloqué sur un exercice de géométrie.
Voici l'énoncé :
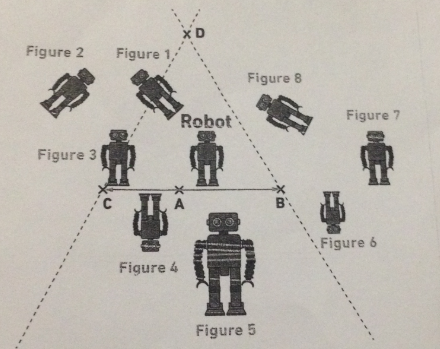
Le robot au centre de l'image est accompagné de huit autres robots obtenus à partir de différentes transformations :
(Image)
Amir pense qu'on a utilisé le même nombre de symétries, de translations, de rotations ou d'homothéties. A-t-il raison ?
Voilà, merci à ceux/celles qui m'aideront pour cet exercice de géométrie.
Bonjpur
qu'est ce qui te bloque ?
la transformation qui fait passer du robot originel à son image "fig8" est assez visible
celle qui fait passer du robot originel au robot "fig5" est visiblement une .... quelle en serait le centre ?
etc
Je vais vous dire ce que je sais :
On peut voir que le 'Robot' est une symétrie centrale de la figure 4 par rapport au point a.
On peut voir que le 'Robot' est la translation de la figure 7 du point C -> B.
On peut voir que le 'Robot' est l'homothétie de la figure 5
C'est tout je sais que ça.
c'est les différentes "figures" qui sont obtenues par transformation de "robot" pas le contraire, mais bon, ça ne change pas grand chose il suffit de considérer les transformations inverses.
le 'Robot' est une symétrie centrale de la figure 4 par rapport au point A. OK mais :
la figure 4 image de robot par la symétrie centrale de centre A, serait plus juste
le 'Robot' est la translation de la figure 7 du point C -> B. faux, c'est le contraire
figure 7 ... translation de robot qui transforme C en B
'Robot' est l'homothétie de la figure 5 OK vu que tu ne précises ni le centre ni un quelconque rapport
(même si on ne connait pas la valeur numérique de ce rapport, on sait s'il est > 1 ou < 1, si c'est une réduction ou un agrandissement)
continues parce que les autres ne sont pas plus durs que ceux là !
J'ai pas compris, j'ai eu bon ou pas pour l'homothétie, mais je sais que c'est un agrandissement k>1.
Breef, pour les autres je vais essayer de trouver.
Figure 1 image de robot subit une rotation, pareil pour la figure 8 , la figure 2.
c'est un agrandissement si c'est la fig5 qui est l'image du robot et pas le contraire.
dire
le 'Robot' est l'homothétie de la figure 5 avec k>1 est faux
c'est avec k < 1
ou alors
la figure 5 est l'homothétie de 'Robot' avec k >1, oui.
(tu peux même préciser le centre : le point D
fig 1 une rotation, oui. tu peux même préciser son centre
fig 2 et 8 semblent être des rotations mais n'en sont pas
ça ne se voit pas bien parce que les robots eux mêmes sont symétriques "gauche-droite"
ils auraient un bras plié qu'on verrait bien la différence avec une rotation.
ici il faut identifier le centre de cette éventuelle rotation et voir comment exactement serait transformé l'axe (la droite "tête-pieds") du robot
figure suit.
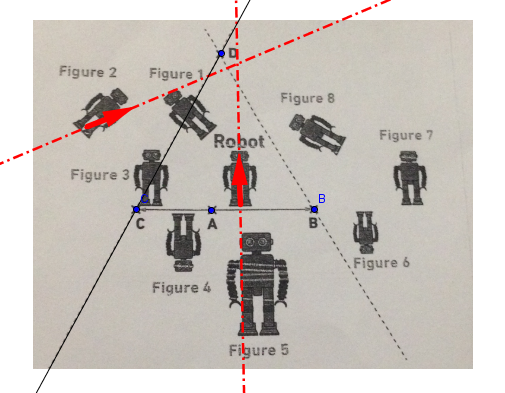
preuve que fig 2 n'est pas une rotation de centre D :
une telle rotation donnerait un "fig2" plus penché (flèche rouge).
Ah oui, la figure 2 n'est pas une rotation. je crois que la figure 1 est la rotation de l'image Robot par rapport au centre a. La figure 3 je ne sais pas ... la figure 6 on voit qu'il est rétréci donc je pense c'est une homothétie du 'Robot' et que c'est un rétrécissement k<1.
la figure 8 aussi je ne sais pas
Et aussi j'ai pas compris quand tu as dit :
la figure 5 est l'homothétie de 'Robot' avec k >1, oui.
(tu peux même préciser le centre : le point D
le centre : le point D j'ai pas compris
une homothétie est définie par un centre d'homothétie et un rapport
la figure 1 est la rotation de l'image Robot par rapport au centre A. (les points sont en majuscule)
non c'est C le centre de la rotation
(il est équidistant des pieds des deux robots, ce que n'est pas A))
la figure 3 est visiblement du même "genre" que la figure 7 que tu avais trouvée
la figure 6 OK, une homothétie (de rapport < 1 en valeur absolue)
le centre s'obtient à l'intersection des lignes pieds-pieds et tête-tête.
(à peu près, les figures ne sont pas d'une exactitude absolue)
pour les transformations qui manquent il y a tout de même un indice dans l'énoncé lui-même :
Amir pense qu'on a utilisé le même nombre de symétries, de translations, de rotations ou d'homothéties
La figure 6 est l'image de Robot par l'homothétie de centre B est de rapport k<1.
La figure 3 est la translation de robot qui transforme B en A.
OK pour la figure 6 mais l'homothétie est en fait de rapport < 0 car les figures sont inversées, de valeur absolue (si on ignore le signe) < 1, tout à fait.
fig 3 OK
pas d'accord du tout pour la fig 8
ni pour le fait que ce serait une rotation (pour la même raison que la figure 2) et en tout cas encore moins de centre B !
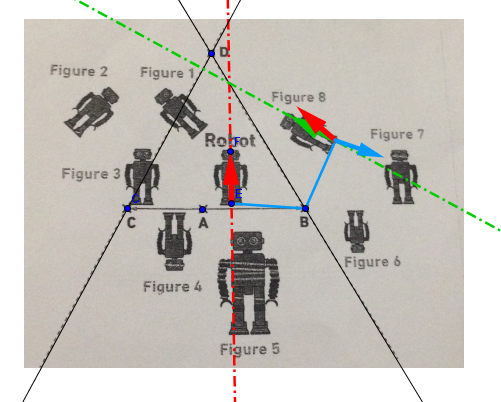
en bleu ce que serait une rotation de centre B !!
(en rouge ce que serait une rotation de centre D, en vert le vrai)
que penses tu de ce que je t'ai souligné en rouge dans ma citation de l'énoncé ? quelles figures pourraient être obtenues par des symétries ?
Ahhhh c'est la symetrie axale, la figure 8 image de 'Robot' est la symetrie axiale par rapport à la droite DB
non pour la figure 2
surement pas !!! même raison que pour la 8
certaienement pas de centre C en tout cas, ça ne tient pas plus debout que la rotation de centre B pour la fig8 ça serait vraiment TRES différent : carrément orienté à l'opposé !!
ensuite il va falloir réfléchir à ce que demande l'énoncé
il ne demande pas explicitement quelles transformation pour chaque robot, ça c'est une partie de la démonstration / justification.
il demande si c'est vrai ou pas qu'il y a autant de transformation de chaque sorte !
et là tu verras que la 4 était peut être fausse !!
(une symétrie centrale est aussi une ... )
Donc, non il n'y a pas autant de transformations de chaque sort car il y a 3 symétries (axiale et centrale. Figure 4,8 et 2) il y a 2 translations (Figure 7 et 3) et il y a 2 rotations (Figure 1 et Figure 4) et il y a 2 homothéties. Dites moi si j'ai raison.
récapitulons
fig1 rotation de centre C
fig 2 on ne sait toujours pas, toutes les hypothèses émises jusque là sur cette figure sont fausses.
fig3 translation B->A
fig4 symétrie centrale ou rotation de centre A, au choix
fig5 homothétie de centre D de rapport > 1
fig6 homothétie de centre B de rapport |k| < 1 et k < 0
fig7 translation C->B
fig8 symétrie axiale DC
il y a donc deux cas litigieux :
la fig 2 toujours pas trouvée et la fig4 qui peut être au choix une symétrie centrale ou une rotation (de 180°)
ça serait bien de choisir pour qu'on puisse répondre "vrai" 
selon la réponse à la question 2 ...
oui cette fois OK entre temps
fig1 rotation de centre C
fig2 symétrie axiale DC
fig3 translation B->A
fig4 symétrie centrale ou rotation de centre A, au choix
fig5 homothétie de centre D de rapport > 1
fig6 homothétie de centre B de rapport |k| < 1 et k < 0
fig7 translation C->B
fig8 symétrie axiale DB
il y a donc une symétrie de trop et une rotation qui manque
donc le choix pour la 4
Mais attendez j'ai une question, la figure 6 subit une homothétie mais aussi une symétrie centrale car le rapport est négatif vu que la figure est retournée
c'est comme pour Thalès avec ses deux formes : la forme "papillon" c'est aussi Thalès sans avoir besoin de transformer la forme papillon en la forme "normale" en plus par une symétrie centrale
c'est pour ça que je dis que le rapport k est négatif. et que une homothétie suffit à décrire robot --> fig6
Mais donc Amir n'a pas raison. vu que il y a 4 (2 sûr) symétries , 2 (1 sûr )homothéties, 2 translations , 2 rotations .
???
d'abord on suppose que chaque robot est obtenu par UNE transformation
pas par des combinaisons de plusieurs transformation (une homothétie > 0 PLUS une symétrie centrale à faire toutes les deux pour fig6 etc )
fig1 rotation de centre C
fig2 symétrie axiale DC
fig3 translation B->A
fig4 symétrie centrale ou rotation de centre A, au choix
fig5 homothétie de centre D de rapport > 1
fig6 homothétie de centre B de rapport |k| < 1 et k < 0
fig7 translation C->B
fig8 symétrie axiale DB
2 symétries fig2 et fig8
2 translations fig3 et fig7
2 rotations fig1 et fig4
2 homothéties fig5 et fig6
le compte est bon (c'est le choix de Amir)
après on peut pinailler jusqu'à la fin des temps si on souhaite le perdre
il ne faut pas
une homothétie c'est la même chose que Thalès.
elle se présente sous la forme directe et sous la forme "papillon"
dans les deux cas c'est une homothétie et puis c'est tout.
forme directe
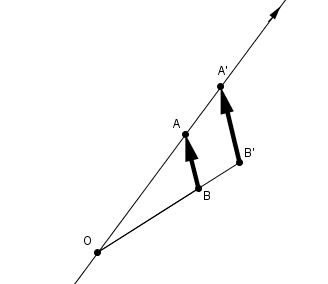
le rapport k est > 0, si on gradue la droite OA les abscisses de A et A' satisfont à
abscisse de A' = k*abscisse de A
elles sont de même signe
forme"papillon"
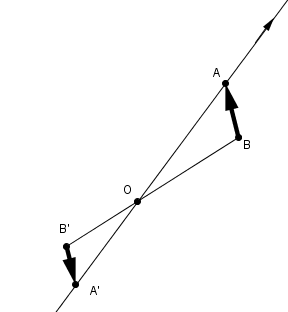
on a exactement pareil, l'abscisse de A' est = k*abscisse de A
mais k est < 0 (sur la droite orientée elles sont de signes opposés)

