Inscription / Connexion Nouveau Sujet
matrice symétrique
Bonjour,
Ci-dessous une matrice représentant un tenseur de contrainte σ et une matrice représentant le tenseur de déformation ε. (utilisé dans la loi de Hooke pour les matériaux) → voir image 1
a) J'aurais voulu savoir comment arrivons nous à passer de la matrice du tenseur contrainte σ ( symétrique et de rang 2) en une matrice de rang 1?
Idem pour la matrice du tenseur de déformation ε ?
Pour quelle raison les 3 dernières lignes sont-elles multipliées par 2 (lorsque la matrice est représentée en rang1) ?
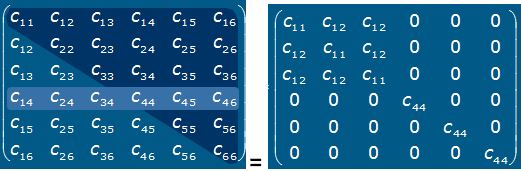
b) Comment est simplifié la matrice symétrique 6x6 ? Je ne comprends pas le principe.
→ voir mage 2
Merci pour votre aide

Bonjour,
Pour ta question a), il s'agit de conventions qui ont à voir avec la physique des matériaux. Les ont à voir avec les angles de cisaillement, semble-t-il.
Et pour la b, comment veux-tu qu'on te réponde si tu n'expliques rien du contexte ?
Bonsoir GBZM,
Merci pour votre réponse.
Pour la a) je ne comprends pas comment passons-nous d'une matrice 3x3 en 6x1? Est ce une propriété de symétrie? Si oui laquelle?
Pour la b) cela concerne une matrice d'élasticité du matériau dans la loi de Hooke pour un matériau isotrope. C'est une matrice symétrique. Ce que je ne comprends pas est le passage de l'une à l'autre. Mais je ne sais pas si cette question doit s'y retrouver dans ce forum ?
Merci

