E désigne un espace vectoriel de dimension fini muni d'un produit scalaire et de la norme associée.
I. Endomorphismes normaux
Rappel Soit est appelé l'adjoint de .
Soit une base orthonormale de si alors
Proposition 1 ([M]p357-358)
et sev de , stable par alors stable par
Définition 2
est dit normal si est dit normal si
Proposition 3 ([G]p254)
normal ssi
Théorème 4 ([C]p159)
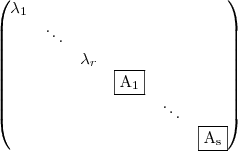
normal ssi il existe une base de orthonormée telle que soit presque diagonale dans cette base.
Avec Et
Lemme 5 ([C]p157)
Si endomorphisme normal, et si sous espace de stable par alors stable par .
II. Endomorphismes symétriques
Définition 6
est dit symétrique ou autoadjoint si .
est dit antisymétrique si
Exemple : Si , est symétrique.
Remarque : Si symétrique, alors est normal.
avec
et
Proposition 7 ([G]p240)
autoadjoint ssi la matrice de dans une quelconque base orthonormée est symétrique.
Définition 8
est dite positive si On note l'ensemble des telles matrices.
est dite définie positive si On note l'ensemble des telles matrices.
Exemple :
Proposition 9 ([M]p359)
Soit tel que est un isomorphisme d'espaces vectoriels de vers l'ensemble des formes bilinéaires symétriques.
Théorème 10 ([G]p240)
Si alors il existe une base orthonormée de , formée de vecteurs propres pour .
Si orthogonale telle que :
soit diagonale
Corollaire 11 ([G]p241)
Si , alors il existe telle que
soit diagonale
Application : Si est une forme quadratique, il existe une base orthonormale dans laquelle la matrice de est diagonale.
Remarque : On pourrait aussi réduire les endomorphismes antisymétriques par le Théorème 4.
III. Endomorphismes orthogonaux
Définition 12
est orthogonal si et seulement si il vérifie l'une de ces quatre propositions équivalentes.
l'image par d'une base orthonormée est une base orthonormée.
On note l'ensemble des endomorphismes de qui sont aussi appelés isométries de .
Remarque : est un sous groupe de Si , est normal.
est dite orthogonale si
Exemples : Les symétries orthogonales sont des isométries.
Les matrices de permutations sont des isométries.
Les projections orthogonales ne sont pas des isométries.
Proposition 13 ([G]p252-253)
est une isométrie ssi la matrice de dans toute base orthonormale est une matrice orthogonale.
Remarque : Si on a On note qui est un sous groupe distingué de On définit de même
Proposition 14
et sont des sous groupes compacts de
Proposition 15 ([G]p252-253)
Si il existe une base orthonormée telle que
Avec
Remarque : pair
Application : est connexe par arcs.
IV. Le groupe orthogonal
Théorème 16 ([MT]p18-19) - Décomposition polaire
Soit est un homéomorphisme.
Application ([A]p138-140) : sous groupe compact de sous groupe compact maximal de
Corollaire 17
et diagonale à valeurs propres réelles positives telles que
Proposition 18 ([C]p?) - Décomposition d'Iwasawa
Si alors il existe un unique couple avec orthogonale et triangulaire supérieure à coefficients diagonaux positifs tel que:
Proposition 19 ([B]2.7.5 et 8.2.5.2)
Soit un sous groupe compact de , il existe une structure euclidienne -invariante sur
Définition 18
une symétrie orthogonale.
Si est appelé réflexion.
Si est appelé renversement.
Proposition 20 ([P]p142)
Si pair Si impair
Proposition 21 ([P]p143)
est le produit d'au plus réflexions.
Corollaire 22
est le produit d'un nombre pair de réflexions.
Proposition 23 ([P]p143)
Pour est engendré par les renversements.
Application ([P]p148) : est simple.
Proposition 24 (([P]p150))
Soit .
Alors pour et est simple.
Proposition 25 ([P]p152)
Tout automorphisme de est intérieur.
Remarque [P] : est le groupe dérivé de et si c'est aussi celui de .
alors ou avec .
est commutatif est isomorphe à On peut noter que le groupe est composé de :
, , les rotations et les produits de 3 réflexions.
Désolé, votre version d'Internet Explorer est plus que périmée ! Merci de le mettre à jour ou de télécharger Firefox ou Google Chrome pour utiliser le site. Votre ordinateur vous remerciera !
,\;\exists !\;f^*\in\mathcal{L}(E)/\forall\quad(x,y)\in E^2)
,y>=<x,f^*(y)>)
 est appelé l'adjoint de
est appelé l'adjoint de  .
.
 une base orthonormale de
une base orthonormale de  si
si =M) alors
alors =^tM)
=(Im(f))^{\perp}) et
et =(Ker(f))^{\perp})
 sev de
sev de  stable par
stable par ) est dit normal si
est dit normal si 
) est dit normal si
est dit normal si 
) normal ssi
normal ssi \| = \|f^*(x)\|)
 Avec
Avec 
\in\mathbb{R}^2)
 .
.

 est symétrique.
est symétrique.
=Sym(E)\oplus\AA(E)) avec
avec
=\lbrace f\in\mathcal{L}(E),f^*=f\rbrace ) et
et =\lbrace f\in\mathcal{L}(E),f^*=-f\rbrace )
=\lbrace M\in M_n(\mathbb{R}),\:^tM=M\rbrace )
) est dite positive si
est dite positive si 
) l'ensemble des telles matrices.
l'ensemble des telles matrices.
) est dite définie positive si
est dite définie positive si 
) l'ensemble des telles matrices.
l'ensemble des telles matrices.
\quad ^tMM\in\S_n^+(\mathbb{R}))
\quad ^tMM\in S_n^{++}(\mathbb{R}))
 est une forme quadratique, il existe une base orthonormale dans laquelle la matrice de
est une forme quadratique, il existe une base orthonormale dans laquelle la matrice de ) est orthogonal si et seulement si il vérifie l'une de ces quatre propositions équivalentes.
est orthogonal si et seulement si il vérifie l'une de ces quatre propositions équivalentes.

\in E^2\;<f(x),f(y)>=<x,y>)
\| = \|x\|)
) l'ensemble des endomorphismes de
l'ensemble des endomorphismes de )
) ,
, ) est dite orthogonale si
est dite orthogonale si 
)^2=1)
=\lbrace f\in O(E),\; \det(f)=1\rbrace ) qui est un sous groupe distingué de
qui est un sous groupe distingué de =\lbrace M\in O_n(\mathbb{R}),\mbox{\det }M=1\rbrace )
) sont des sous groupes compacts de
sont des sous groupes compacts de  pair
pair )
) est connexe par arcs.
est connexe par arcs.
) sous groupe compact de
sous groupe compact de )
)
)
) = \| \sqrt{^tMM}-I_n \| )
,\; \exists (\Omega_1,\Omega_2)\in(O_n(\mathbb{R}))^2) et
et  diagonale à valeurs propres réelles positives telles que
diagonale à valeurs propres réelles positives telles que 
)=n-1)
)=n-2)
)=\lbrace \pm I_n\rbrace )
 pair
pair )=\lbrace \pm I_n\rbrace )
)=\lbrace I_n\rbrace )
) est le produit d'un nombre pair de réflexions.
est le produit d'un nombre pair de réflexions.
) est simple.
est simple.
 ) est le groupe dérivé de
est le groupe dérivé de  c'est aussi celui de
c'est aussi celui de )=\lbrace I_2\rbrace )
) alors
alors  ou
ou  avec
avec  .
.
) est commutatif est isomorphe à
est commutatif est isomorphe à 
) est composé de :
est composé de :
 ,
,  , les rotations et les produits de 3 réflexions.
, les rotations et les produits de 3 réflexions.
\approx \mathbb P^3 \mathbb{R})
)\approx\mathbb Z/2\mathbb Z)
\rightarrow \psi_f\in BL_S(E)) tel que
tel que =<f(x),y>)
 est un isomorphisme d'espaces vectoriels de
est un isomorphisme d'espaces vectoriels de ) vers
vers ) l'ensemble des formes bilinéaires symétriques.
l'ensemble des formes bilinéaires symétriques.
) alors il existe une base orthonormée
alors il existe une base orthonormée ,\exists\; C\in M_n(\mathbb{R}),\; C) orthogonale telle que :
orthogonale telle que :
 soit diagonale
soit diagonale
) ,
, ) alors il existe
alors il existe ) telle que
telle que
 soit diagonale
soit diagonale
=\begin{pmatrix}I_p& & & &\\ &-I_q& & &\\ & &\boxed{R_1}& & \\ & & &\ddots& \\& & & &\boxed{R_s}\end{pmatrix}) Avec
Avec \in \mathbb{N}^3/\quad p+q+2s=n)
&-sin(\theta_i)\\sin(\theta_i)&cos(\theta_i) \end{pmatrix})

\in O_n(\mathbb{R})\times S_n^{++}(\mathbb{R})\rightarrow OS\in GL_n(\mathbb{R})) est un homéomorphisme.
est un homéomorphisme.
) alors il existe un unique couple
alors il existe un unique couple ) avec
avec  orthogonale et
orthogonale et  triangulaire supérieure à coefficients diagonaux positifs tel que:
triangulaire supérieure à coefficients diagonaux positifs tel que: 
 un sous groupe compact de
un sous groupe compact de 
) est engendré par les renversements.
est engendré par les renversements.
=SO_n(\mathbb{R})/Z(SO_n(\mathbb{R}))) .
.
 et
et 
) est simple.
est simple.
 Forum enseignement
Forum enseignement