Inscription / Connexion Nouveau Sujet
flood sur "déterminer angle de rotation point mobile"
***lafol > question d'origine et flood qui s'en est suivi ...
le topic d'origine et la réponse de Robot sont restés dans le forum supérieur
bonjour tous le monde,
j'ai un problème un peu compliqué que je n'arrive pas à le résoudre tout seul. j'ai un repère fixe R(o,i,j) dans lequel on un point fixe noté B de coordonnées (x,y) et un objet mobile noté A qui navigue dans le plan, représenté par le repère R, cet objet possède une direction qui varie selon la vitesse de rotation. donc à chaque instant l'objet A change de direction.
Mon objectif principale est de trouver l'angle de rotation que doit appliqué l'objet A pour s'orienter et atteindre le point B.
je serai reconnaissante pour vos aides.

salut Camarade Oumay
proposition de réponse : chapitre 1 (je sais pas combien de chapitres contiendra la réponse)
j'ai un repère fixe R(o,i,j) dans lequel on un point fixe noté B de coordonnées (x,y) et un objet mobile noté A qui navigue dans le plan, représenté par le repère R, cet objet possède une direction qui varie selon la vitesse de rotation. donc à chaque instant l'objet A change de direction.
Mon objectif principale est de trouver l'angle de rotation que doit appliqué l'objet A pour s'orienter et atteindre le point B.
je serai reconnaissante pour vos aides.
si c'est ce que j'en comprend il faudrait décomposer le problème en deux parties
dans la premiere partie (celle que je donne ici) proposer un ensemble non denombrable de trajectoires qui admettent une différencielle entre deux points
le point de depart de cette trajectoire sera nommée le point A
le point d'arrivé sera nommé B
puis on se donne une variable réelle x dans l'intervalle [0,1] telle qu'a tout élément x de cet intervalle on obtienne un point C et tel que pour x=0 on obtiens C=A
et pour x=1 on obtiens C=B
(en fait une application de l'intervalle [0,1] vers l'espace affine du plan)
ensuite ayant proposé cet ensemble de trajectoires essayer de traiter le probleme à partir de là où sera déterminé pour tout point C (donc pour tout réel x de cet intervalle [0,1] ) on commencera à traiter la suite de la problématique en recherchant le rayon de courbure sur cette trajectoire au point C -et pour toute trajectoires parmis l'ensemble non dénombrable de trajectoires construites dans la premiere partie
puis cela une fois fait on pourra s'approcher de ce que tu recherche en appliquant le principe du mouvement circulaire uniforme en physique où à chaque rayon de courbure
selon la formule
l'aaceleration vectorielle de la force centripète étant donnée par la formule
description
le vecteur
les vecteurs
bon à plus tard pour le chapitre 2 de ma proposition de réponse
re-salut Camarade Oumay
proposition de réponse : chapitre 2 (je sais pas combien de chapitres contiendra la réponse)
dans ce deuxième chapitre (il s'agit de commencer à traiter la première partie du problème selon ce que je propose)
on va donc commencer par construire l'ensemble non dénombrable est un ensemble de cardinal
chaque élément de constituant une trajectoire possible passant entre deux points donnés
et
du plan et qui admette une différencielle
étant entendu que si certes l'ensemble n'est pas dénombrable , il ne constitue cependant pas l'ensemble de toutes les trajectoires possibles
par ailleurs pour chaque élément (donc une trajectoire) on va poser une application notée
qui à tout réel
de l'intervalle [0,1] on associe un point noté
sur lequel passe la trajectoire
et tel que et
par ailleurs pour chaque élément (donc une trajectoire) on va poser une application notée
qui à tout réel
de l'intervalle [0,1] on associe une matrice notée
où en posant
on vérifie
où la notation désigne la composante située sur la
ième ligne et la
ième colonne de la matrice
matrice que l'on determine pour tout x dans l'intervalle [0,1] par l'application et pour toute trajectoire
de l'ensemble
de toutes les trajectoires que l'on se propose ici de construire
et encore une fois étant entendu que si certes l'ensemble n'est pas dénombrable , il ne constitue cependant pas l'ensemble de toutes les trajectoires possibles
par ailleurs le vecteur unitaire de composante est le vecteur de même direction et sens que le vecteur vitesse
décrit au chapitre 1
bon à plus pour le chapitre 3 et donc continuer à traiter la premiere partie de la problématique selon ce que j'en propose et selon ce que je comprend de ce que recherche le camarade Omay)
re-salut Camarade Oumay
proposition de réponse : chapitre 3 (je sais pas combien de chapitres contiendra la réponse mais ceci dit le chapitre 3 est facile à écrire puisque c'est un papier collé d'un truc que j'ai déjà écrit sur le forum expresso et servant pour un problème qui n'a rien à voir puisque cet outil n'a strictement rien à voir avec un sujet de géometrie affine et encore moins avec la dynamique -qui est le thème central de ton "énoncé" si j'arrive à le traduire correctement : je proposerai un énoncé correctement formulé à la fin qui ne trahise pas ta pensée )
bref ...on va se munir d'un outil qui servira à contruire notre ensemble voir chapitre 1 et 2
cet outil constitue un ensemble d'applications (étant entendu que c'est un outil qui va servir pour le chapitre 4
on se donne dans
et tels que
alors on construit l'ensemble est un ensemble de cardinal
dont les éléments sont des applications de classe
applications telles que d'une part on vérifie toujours ,
,
,
construction de cet l'ensemble
cet ensemble |
|
|
|
|
|
|
|
|
lorsque et
tendent vers
et que
tend vers zero alors la longueur de l'arc de ces applications entre les points
et
tend vers la distance entre ces deux points
on pose les valeurs selon :
et on pose l'application
et enfin on pose six fonctions avec leurs dérivées respectivement
alors les applications que l'on recherche sont définies par
re-salut Camarade Oumay
proposition de réponse : chapitre 4 (je sais pas combien de chapitres contiendra la réponse )
sur ce chapitre on commence la construction de l'ensemble voir signification au chapitre 2
il faudra plusieurs chapitres pour en terminer la construction -car c'est long à écrire- et ainsi clore la premiere partie de la résolution de "ton énoncé" , énoncé que je me proposerai de re-écrire à la fin car il est mal formulé et selon ce que j'en ai compris)
évidemment si mon énoncé ne correspondra pas à ce que tu désirai dire il suffira de me le faire savoir
bon je continue...
on se donne donc deux points et
définis sur le repere canonique du plan affine repere d'origine
et associé à la base canonique représenté par la matrice
et on se donne (voir chapitre 1) deux vecteurs vitesse que l'on note par commodité et
et selon ce qu'on a écrit au chapitre 2
en fait et
bien relire le chapitre 2 car là ça va se compliquer
de plus l'indice u indiquant une trajectoire parmis d'autres on ne re-écrira pas cet indice étant entendu que ici il s'agit de determiner une trajectoire parmis d'autres possibles
car de plus on aura besoin d'utiliser un parametre que l'on notera u (le parametre decrit dans le chapitre 3 et pour ne pas faire de confusion on simplifie les notations en ne traitant qu'une seule trajectoire)
pour determiner d'autres trajectoire on decrira plus loin la maniere de proceder
par conséquent pour se conformer aux notations
et
par ailleurs avec l'application sur lequel passe la trajectoire
pour tout réel
de l'intervalle [0,1]
et tel que et
par ailleurs avec l'application matrice de composantes
où au point est associé le vecteur vitesse
...bon je reprend plus tard...
re-salut Camarade Oumay
proposition de réponse : chapitre 5 (je sais pas combien de chapitres contiendra la réponse )
sur ce chapitre on continue la construction de l'ensemble amorcé au chapitre 4 (voir signification au chapitre 2)
il faudra plusieurs chapitres pour en terminer la construction -car c'est long à écrire- et ainsi clore la premiere partie de la résolution de "ton énoncé" , énoncé que je me proposerai de re-écrire à la fin car il est mal formulé et selon ce que j'en ai compris)
évidemment si mon énoncé ne correspondra pas à ce que tu désirai dire il suffira de me le faire savoir
bon je continue...
Attention : dans ce qui suit on va noter des angles munis d'un indice mais ces angles n'ont rien à voir avec ce dont on a parlé au chapitre 1 où là bas on a un peu ; sans entrer dans les détails , parlé de l'aspect dynamique de ton énoncé
cet aspect là on le traitera une fois qu'on aura terminé de construire l'ensemble
c'est à dire dans la deuxième partie du problème (voir chapitre 1 comment on a décomposé le traitement de ce problème en deux parties)
bref ...
au chapitre 4 on s'ai doté des deux points A et B -attention ces deux points doivent êtres impérativement distincts-et on s'ai doté de deux vecteurs vitesse et
à ces deux vecteurs vitesses on associe respectivement deux angles notés et
dans l'intervalle
selon
pour on pose
pour on pose
pour on pose
pour on pose
et on vérifie
par ailleurs on a précédemment vu au chapitre 2 je cite (en le re-écrivant selon la recommendation dite au chapitre 4)
on va poser une application notée
et tel que
et au chapitre 4 on a adopté la notation des composantes de ce point selon
de même on a adopté les notations
la formulation de solution du point C lorsque les points sont écrits sous une forme matricielle
est donné par l'expression
plus loin on parlera de cette matrice qu'on a noté
ici
notons
on pose
par ailleurs pour les vecteurs
là aussi on les écrits sous forme matricielle ainsi
alors on construit deux vecteurs notés
à ces deux vecteurs on associe respectivement deux angles notés
pour
pour
pour
pour
bon je pause un peu...c'est long... il en reste beaucoup à faire
re-salut Camarade Oumay
proposition de réponse : chapitre 6 (je sais pas combien de chapitres contiendra la réponse )
sur ce chapitre on continue la construction de l'ensemble amorcé au chapitre 4 (voir signification au chapitre 2)
il faudra plusieurs chapitres pour en terminer la construction -car c'est long à écrire- et ainsi clore la premiere partie de la résolution de "ton énoncé" , énoncé que je me proposerai de re-écrire à la fin car il est mal formulé et selon ce que j'en ai compris)
évidemment si mon énoncé ne correspondra pas à ce que tu désirai dire il suffira de me le faire savoir
bon je continue un peu pour avancer mais là je dois partir je reprendrai plus longuement plus tard...
là tout de suite je fais juste la premiere configuration sur les 17 à faire
on considère donc 17 configurations selon les valeurs des angles et
obtenus
on utilise pour ce faire l'application et sa dérivée
donnée sur le chapitre 3
l'ensemble de ces applications qui est définie
|
|
|
|
|
|
|
|
|
il s'agit alors pour ces 17 configurations de se donner les paramètres dans
et tels que
on rappelle qu'il reste à donner la valeur de la matrice
par ailleurs pour toutes ces configurations on définit un réel
1er type de configuration
et
sont dans l'intervalle
on obtiens
et
avec les parametres
on obtiens le vecteur écrit sous une forme matricielle
re-salut Camarade Oumay
proposition de réponse : chapitre 7 (je sais pas combien de chapitres contiendra la réponse )
ici sur ce chapitre et avant de continuer les 16 autres configurations deux remarques sont à faire
et un quelques généralitées valables pour toutes les 16 autres configurations
remarque numéro 1
attention: comme je l'ai dit précédemment j'ai divisé ton problème en deux parties
l'aspect géométrique et l'aspect dynamique
jusque là je ne traite que la partie géometrique de ce problème de sorte qu'en parlant du vecteur (sur plusieurs chapitres je l'ai nommé à tord vecteur vitesse )
je voulais dire que l'unitaire de ce vecteur là correspond au vecteur dont j'ai parlé au chapitre 1
au chapitre 1 je ne fais qu'aborder vaguement l'aspect dynamique du problème
remarque numéro 2
pour toutes les autres configurations on va poser des matrices
une série de matrices colonnes qui représentent des points et que l'on note
et une série de matrices inversibles que l'on note
(attention à ne pas la confondre avec la matrice inversible e et les matrices colonnes données au chapitre 5 ) et que l'on note
et enfin une série de matrices colonnes que l'on note
formulations générales valables pour toutes les 16 autres configurations
on obtiens
et
et
les inconnues de ces formulations sont définies selon les 16 types de configurations restants à décrire
bon à plus tard pour la suite je pause un peu...
Bon, je crois que le camarade Oumay aura compris l'intérêt de cibler sa question .... un peu de ménage ....
Je te l'ai mis là pour que tu puisses continuer si tu as encore des trucs à ajouter....
et Oumay a toujours son topic pour préciser sa question d'origine, dans le forum supérieur.
ok camarade Lafol
en fait il en reste pas mal à faire avant même de commencer à aborder l'aspect dynamique du problème
et je terminerai par un énoncé reformulé
(s'il précise le sien je verrai bien avant même d'avoir à le reformuler)
comme de toute façon l'aspect géometrique du problème sera sûrement inchangé quelque soit son énoncé car je le cite
Mon objectif principal est de ... ??? ... l'objet A pour s'orienter et atteindre le point B
par conséquent il ne définie pas de trajectoire précise de son objet A et que je nomme point
pour le reste à plus camarade Lafol ...
... de toute façon j'ai constaté que l'auteur du sujet a disparu
de plus en ce qui concerne les trajectoires que j'ai donné ici (en fait partiellement car je n'ai pas terminé )
et cela à partir de deux points du plan A et B associés à deux vecteurs respectivement et
un mobile de position C se deplaçant selon les lois de la dynamique classique dans le plan du point A au point B et tel qu'au niveau du point A son vecteur vitesse est le vecteur et qu'au niveau du point B son vecteur vitesse est le vecteur
alors on peut encore en proposer d'autres en rajoutant un autre paramètre réel strictement positif (autre que le parametre
et que le parametre
|
déjà présent dans la construction)
et tel que pour tend vers zero la longueur curviligne de la courbe entre A et B tend vers la distance entre ces deux point A et B
de fait à la limite j'ouvrirai un sujet sur ce forum expresso avec un titre correct et je laisse celui tel quel ...
bonjour camarade amethyste
merci pour l'explication et merci pour l'aide, je suis toujours là mais je suis entrain de suivre toutes vos réponses pour comprendre l'explication.
re-salut
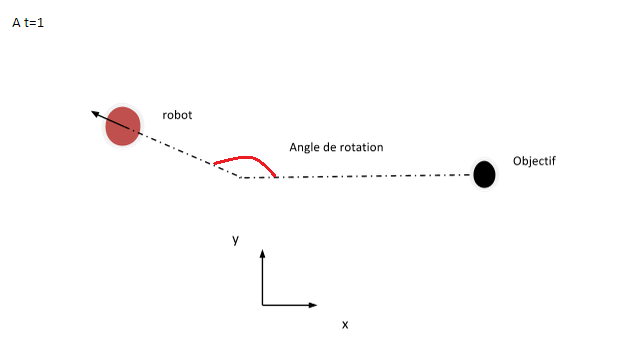
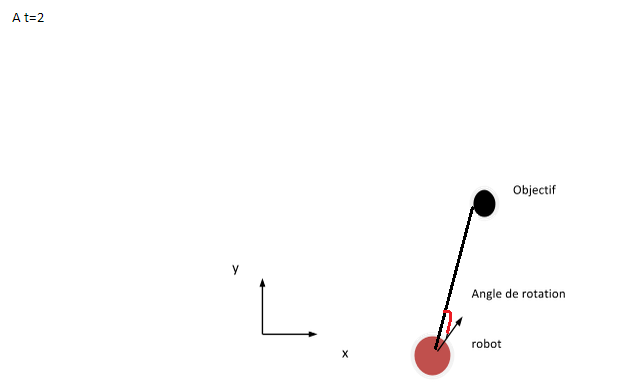
je vais mieux expliquer mon problème par ces deux images :
la 1ère image à t=1 : on a un robot mobile qui navigue dans son environnement il doit calculer l'angle de rotation entre le robot et son objectif (cet angle de rotation dépend fortement de la direction du robot)
la 2ème image à t=2 : le robot se déplace dans un autre endroit, sa direction change donc il veux calculer de nouveau l'angle de rotation entre sa direction et son objectif.
mon objectif principal c'est d'orienter le robot vers son objectif, donc cet angle est connu par la vitesse de rotation du robot qu'il doit exécuter pour s'orienter vers son objectif. donc je veux avoir la vitesse de rotation (angle entre le robot et l'objectif) à t=1, puis à t=2.
merci d'avance pour vos aides.
Ton topic d'origine est là : ![]() déterminer angle de rotation point mobile
déterminer angle de rotation point mobile
ok camarade Oumay
je continue donc selon l'ensemble des trajectoires
une fois completement construit cet ensemble constituera un sous ensemble d'un ensemble de trajectoires (encore plus grand) où on rajoutera un parametre réel et tel que pour
tend vers zero la longueur curviligne de la courbe entre A et B tend vers la distance entre ces deux point A et B
car dans les trajectoires que je construit ici et bien que l'ensemble soit non denombrable ce dernier est trop restreint
puis une fois fait on abordera l'aspect dynamique de probleme
en attendant accepte tu ce que je dit ci-dessous ?
comme tu l'a vu dans la premiere partie je suppose que ton objet qui va d'un point A vers un point B dans le plan subit la loi du mouvement circulaire uniforme et donc est soumis au vecteur -il s'agit de dynamique donc on ne parle pas de forces mais d'acceleration et de vitesse
est donc soumis au vecteur acceleration
attention ici n'a rien à voir avec le
le parametre qui va permettre d'agrandir l'ensemble des trajectoire et dont je viens de parler
ce dernier n'est pas un parametre il designe le rayon de courbure sur la trajectoire et varie donc selon la position de ton objet dans son parcours sur la trajectoire
ce rayon ici est utilisé pour resoudre l'aspect dynamique de ton problème comme décris ci dessous
ici l'inconnue de ton énoncé n'est pas -car il s'agit du rayon de courbure - ni le vecteur
qui est un vecteur unitaire il s'agit de la normale sur la trajectoire mais plutôt le parametre
qui désigne la vitesse angulaire constante
il faut bien comprendre que ce n'est pas parce que cette vitesse angulaire est constante que la norme de ton vecteur vitesse sera constant
car la norme de ton vecteur vitesse est donné par et donc dépend aussi de la trajectoire de ton objet (en fait le rayon de courbure
à un point donné sur sa trajectoire)
avant de continuer il vaut mieux te poser la question car il est important que l'on se mette d'accord sur ce point capital :
sur ce dernier point dont je viens de parler (traitant de l'aspect dynamique de ton problème)
c'est bien le parametre (et uniquement le seul) et qui est une vitesse angulaire constante que tu doit poser dans ton énoncé
comme je viens de le dire mais je le redit :
il faut bien comprendre que ce n'est pas parce que cette vitesse angulaire est constante que la norme de ton vecteur vitesse sera constant
on est d'accord ?
... étant donné que ton énoncé initial est mal posé
que pense tu de cet énoncé et te conviens t-il ?
soit un robot se déplaçant sur le plan et pouvant tourner sur lui même afin de modifier sa direction de deplacement
déterminer un ensemble de trajectoires au choix du robot afin que partant d'un point du plan selon une direction définie par le vecteur unitaire
il arrive sur le point selon une direction définie par le vecteur unitaire
toute trajectoire (au choix du robot) associant à tout réel dans l'intervalle
la position du robot au point
et selon une direction définie par le vecteur unitaire
et tel que pour on obtiens
et
et tel que pour on obtiens
et
il reviens ensuite à toi de te donner les parametres techniques suivants pour ton robot
sa vitesse maximale notée et son acceleration maximale notée
et enfin sa vitesse angulaire maximale de sa rotation notée
cet énoncé te conviens t-il ?
si oui j'ouvrirai un sujet sur cette rubrique "expresso" reprenant cet énoncé et je laisse celui là en plan
de plus en me relisant j'ai du mal à me suivre tellement je suis illisible et brouillon là pour le coup
merci pour cette bonne explication, je suis totalement d'accords avec l'énoncé que vous avez proposer. Mon objectif est de trouver la vitesse angulaire ou de rotation entre le robot et de son objectif. donc à chaque instant, le robot est conçu à calculer l'angle qui lui sépare de son objectif pour ajuster sa vitesse de rotation jusqu'à atteindre le point B. Mais est ce qu'on peut représenter la vitesse angulaire en fonction de sa vitesse et de son accélération?
merci pour votre réponse
je suis totalement d'accords avec l'énoncé que vous avez proposé
ok ! donc j'ouvre un sujet avec ce nouvel énoncé et essaye de faire un truc plus lisible et moins brouillon
ceci étant compte tenu de votre question là (j'ai un petit doute sur le fait que vous soyez d'accord)
Mais est ce qu'on peut représenter la vitesse angulaire en fonction de sa vitesse et de son accélération?
pas representer mais adapter plutôt (car sinon il risque de déraper et perdre son équilibre)
mais si vous êtes d'accord cette question est alors hors propos car
c'est quand même un énoncé que si il est traité restera loin de votre objectif :
que les choses soient claires tout ce dont l'énoncé traitera c'est uniquement ce que j'ai dit le 27-03-15 à 18:56
donc tres loin de ce qui suit là et de votre question
le robot est munis de trois mecanismes qui fonctionnent de façon simultanées et dont on ne parlera pas
1)un mecanisme lui permettant de se deplacer selon une direction donnée avec une vitesse maximale donnée
2)un mecanisme lui permettant de pivoter sur lui même et donc de changer de direction
(avec plusieurs possibilités au choix du constructeur)
-soit selon une vitesse angulaire constante
-soit selon une vitesse angulaire variable
3)un mecanisme qui lui permet à chaque instant de determiner sa position et sa direction et de determiner la position et la direction à l'instant suivant pour qu'au final il rejoigne le point B et selon une direction donnée
________________________
c'est toujours d'accord ?
salut,
je suis d'accords, même si cet énoncé est loin de mon objectif principal mais ça va m'aider en toute sorte.
ok Oumay donc pour que tout soit clair et lisible on suivra ce fil là dont le titre est "trajectoires dans le plan" sur le lien là
ok Oumay donc pour que tout soit clair et lisible on suivra ce fil là dont le titre est "trajectoires dans le plan" sur le lien là ![]() trajectoires dans le plan et on abandonne donc ce fil là
trajectoires dans le plan et on abandonne donc ce fil là

