Afin de mener des calculs simples (par exemple dans les systèmes linéaires), il est intéressant de disposer de matrices les plus creuses possibles, c'est-à-dire ayant le plus possible de coefficients nuls.
La fiche "réduction des endomorphismes linéaires" introduit les notions de diagonalisation et de trigonalisation des endomorphismes qui apportent déjà une amélioration considérable. Rappelons que la diagonalisation est une situation très privilégiée.
Nous allons dans cette fiche affiner la trigonalisation par une autre forme de réduction : la réduction de Jordan.
Dans toute la suite, E est un K-ev de dimension finie n > 0, L(E) le K-ev des endomorphismes de E, Mn(K) le K-ev des matrices carrées d'ordre n à coefficients dans K.
Si B(E) est une base de E, u un endomorphisme de E, alors, la matrice de u sur B(E) se notera Mat(u,B(E)).
On désigne par O l'endomorphisme nul et par eE ou plus simplement e l'automorphisme identité de L(E).
Nous noterons Op,q la matrice nulle à p lignes et q colonnes, On = On,n et In la matrice identité d'ordre n.
L'ensemble des valeurs propres de u dans K s'appelle le spectre de u dans K, noté SpK(u).
I - Endomorphismes nilpotents
I - 1. Définition, Remarques
Définition 1
Un élément u de L(E) est dit nilpotent s'il existe un entier N > 0 tel que uN = O. Le plus petit entier p > 0 tel que up = O s'appelle l'indice de nilpotence de u. De même, une matrice A de Mn(K) sera dite nilpotente s'il existe N > 0 tel que AN = On. Le plus petit entier p > 0 tel que Ap = On sera appelé l'indice de nilpotence de A.
Remarques : Si u est nilpotent d'indice 1, alors u = O.
Si u est nilpotent d'indice p > 1, alors, par définition, up-1 O et up = O.
Comme (P-1.A.P)k = P-1.Ak.P, l'indice de nilpotence de u est égal à l'indice de nilpotence de sa matrice dans toute base de E.
Un endomorphisme nilpotent n'est pas inversible.
Le polynôme minimal d'un endomorphisme u nilpotent d'indice p sera par définition : . Son polynôme caractéristique sera donc : . On peut en déduire dès à présent que p n.
Théorème 1
Si u L(E) est nilpotent d'indice p > 0 et si dim(E) = n, alors le polynôme minimal et le polynôme caractéristique de u sont :
et .
Donc : p n et spK(u) = {0}.
Conséquence : Un endomorphisme u nilpotent d'indice p > 1 n'est pas diagonalisable. En effet, s'il l'était, son spectre étant réduit à {0}, il existerait une base B(E) de vecteurs propres sur laquelle Mat(u,B(E)) = On, ce qui signifierait que u = O. Par contre, un endomorphisme nilpotent étant scindé sur K (son polynôme caractéristique a toutes ses racines dans K), il est toujours trigonalisable, avec la diagonale constituée de zéros.
I - 2. Exemples
a) L'endomorphisme nul O est nilpotent d'indice p = 1.
b) L'automorphisme identité e n'est pas nilpotent ; aucun automorphisme n'est nilpotent.
c) Soient E = R3[X] le R-ev des polynômes de degré 3 et du polynôme nul et u L(E) défini par u(P) = P'', alors u O et u² = O. Donc u est nilpotent d'indice 2.
d) Soient E un K-ev de dimension n > 1, B(E) = (e1 , ... , en) une base de E. Considérons l'endomorphisme v de E défini par : v(e1) = 0E et pour j tel que 2 j n, v(ej) = ej-1. Alors :
Nn = Mat(v,B(E)) = Nn a donc tous ses termes nuls sauf des "1" en a12, a23, ..., an-1,n : première parallèle supérieure à la diagonale principale.
Un calcul simple soit avec v, soit avec Nn donne, pour 1 k n-1 :
(Nn)k = Mat(vk,B(E)) = Les "1" remontent sur la k-ième parallèle supérieure à la diagonale principale. En particulier, si k = n-1, il ne reste qu'un seul 1 situé en a1n, donc (Nn)n-1 On. Par contre, (Nn)n = On.
Définition 2
Nn = est appelée matrice canonique d'ordre et d'indice n.
Exemples : N2 =
N3 =
N4 =
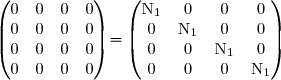
Remarque : Le calcul précédent ne permet pas de définir N1. On peut poser par convention N1 = (0), matrice d'ordre et d'indice 1. Dans ce cas, la matrice nulle d'ordre n, On peut s'écrire symboliquement :
On =
Cette convention permettra de généraliser les notations ultérieures.
I - 3. Un exemple de construction de matrices nilpotentes
Soient E un K-ev de dimension n > 1, E* son dual, B(E) = (e1 , ... , en) une base de E, B(E)* = (e1* , ... , en*) sa base duale. Soient x = x1.e1 + ... + xn.en un vecteur non nul de E et y* = y1.e1* + ... + yn.en* une forme linéaire non nulle de E*.
Appelons X la matrice colonne des coordonnées de x, et Y* la matrice colonne des coordonnées de y*. Alors :
tY*.X est le scalaire < x , y* > = x1y1 + ... + xnyn.
A = X.tY* est une matrice carrée d'ordre n : (X.tY*)ij = xiyj Remarquons que tr(A) = x1y1 + ... + xnyn = tY*.X et que A² = X.tY*.X.tY* = X.(tY*.X).tY* = tr(A).A
Si nous choisissons x dans Ker(y*), alors tr(A) = 0, donc A On et A² = On. Ainsi, A est nilpotente d'indice 2.
Exemple : Si X = t(1 -2 3) et Y* = t(5 1 -1) cela donne A = X.tY* = . On vérifie que A² = O3.
Exercice : Si x Ker(y*), et A = XtY*, montrer que la matrice B = est nilpotente d'indice 3.
I - 4. Base adaptée
Soient E un K-ev de dimension n > 0 et u L(E) nilpotent d'indice p > 0.
Si p = 1, alors u = O et dans toute base B(E), Mat(u,B(E)) = On.
Si p > 1, alors up = O et up-1 O. Il existe au moins un vecteur a E tel que up-1(a) 0E. Etudions la famille :
(a,u) = (up-1(a) , up-2(a), ... , u(a) , a).
Si (1 , ... , p) sont p éléments de K, considérons l'équation (E) d'inconnues les i :
(E) : 1.up-1(a) + 2.up-2(a) + ... + p-1.u(a) + p.a = 0E.
En cherchant les images des deux membres de (E) par up-1, on a de suite : p = 0. En tenant compte de ce résultat et en cherchant l'image des deux membres de (E) par up-2, on obtient p-1 = 0. En itérant ce procédé, on trouve que tous les i sont nuls, donc : (a,u) est une famille libre de E. On retrouve d'ailleurs ainsi le résultat : p n.
Etudions maintenant le sev F(a,u) de E défini par F(a,u) = Vec((a,u)). F(a,u) est de dimension p et (a,u) constitue une base de F(a,u). D'autre part :
x F(a,u)
x = x1.up-1(a) + x2.up-2(a) + ... + xp-1.u(a) + xp.a
u(x) = x2.up-1(a) + ... + xp-1.u²(a) + xp.u(a)
u(x) F(a,u). Donc F(a,u) est un sev de E u-stable.
Théorème 2
Si u est un endomorphisme nilpotent d'indice p > 1 d'un K-ev E de dimension n p, alors pour tout vecteur a de E tel que up-1(a) 0E, la famille (a,u) = (up-1(a) , up-2(a) , ... , u(a) , a) est libre dans E. De plus, le sev de dimension p : F(a,u) = Vec((a,u)) de base (a,u), est u-stable.
I - 5. Réduction associée
Rappelons que si p = 1, u = O.
Si p > 1, F(a,u) étant u-stable, on peut considérer la restriction u' de u à F(a,u). Alors, un simple calcul des images par u' des éléments de (a,u) donne :
Théorème 3
Mat(u', (a,u)) = Np (matrice canonique d'ordre et d'indice p).
Si on a la chance d'avoir p = n, alors F(a,u) = E, u' = u et Mat(u , (a,u)) = Nn. La réduction de u est achevée.
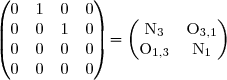
Sinon, on complète (a,u) pour former une base B(E) de E. Alors, compte tenu de la stabilité de F(a,u) :
Mat(u , B(E)) = où Bp,n-p et Bn-p,n-p sont deux matrices liées à la manière dont on a complété la base (a,u) de F(a,u).
Dans la suite, nous chercherons à compléter (a,u) de telle sorte que Bp,n-p et Bn-p,n-p soient simples. En particulier, si l'on parvient à créer un supplémentaire u-stable, on aura Bp,n-p = Op,n-p. Cela permettra d'écrire la matrice de u sous forme de blocs diagonaux.
II - Recherche d'un supplémentaire u-stable
II - 1. Rappels
On trouvera dans les chapitres III et IV sur la dualité les preuves des résultats suivants en dimension finie.
tOL(E) = OL(E*), teE = eE*, t( uk) = ( tu )k.
F sev de E u-stable F° sev de E* tu-stable
G sev de E* tu-stable °G sev de E u-stable
u et tu ont même polynôme minimal et même polynôme caractéristique. Ceci permet de voir que :
u nilpotent d'indice p tu nilpotent d'indice p.
II - 2. Recherche d'un supplémentaire de F(a,u), u-stable
Reprenons donc un K-ev E de dimension finie n et u L(E) un endomorphisme nilpotent d'indice p > 0, (p n).
Si p = 1, u = O et, pour toute base B(E) de E, Mat(u,B(E)) = On.
Si p = n, alors B(E) = (un-1(a) , ... , u(a) , a) et Mat(u,B(E)) = Nn.
Supposons maintenant 1 < p < n.
Pour harmoniser les indices, nous noterons (a1 , ... , ap) la famille libre (a,u) = (up-1(a) , up-2(a), ... , u(a) , a). Cela entraine que, pour 1 i p, ai = up-i(a), (avec la convention u0 = e).
Nous pouvons la compléter par ap+1 , ... , an pour former une base de E : B(E) = (a1 , ... , an). Considérons alors la duale de B(E) : B(E)* = (a1* , ... , an*). Cela entraine en particulier que < a1 , a1* > = 1. Or :
< a1 , a1* > = 1 < up-1(a) , a1* > = 1 < a , tup-1(a1*)> = 1.
Ceci prouve que la forme linéaire tup-1(a1*) est non nulle. Nous mettons ainsi en évidence un élément a1* de E* tel que tup-1(a1*) 0E*. a1* joue, pour l'endomorphisme tu de E*, le rôle du vecteur a pour l'endomorphisme u de E. Ainsi, par le théorème 2, on peut dire que :
1°) la famille (a1*,tu) = (a1* , tu(a1*) , ... , tup-1(a1*)) est libre dans E*
2°) le sev G(a1*,tu) = Vec((a1*,tu)) de E* est tu-stable.
Nous allons prouver enfin que (a1*,tu) est égal à (a1* , ... , ap*).
Posons, pour 1 j p, j = tuj-1(a1*). Alors, (a1*,tu) = (1 , ... , p).
< ai , j > = < up-i(a) , tuj-1(a1*) > = < up-i+j-1(a) , a1* >
si i = j, < ai , j > = < up-1(a) , a1* > = < a1 , a1* > = 1
si j > i, alors, j = i+k, 1 k p-1. < ai , j > = < up+k-1(a) , a1* > = < 0E , a1* > = 0
si j < i, i = j+k, 1 k p-1. < ai , j > = < up-(k+1)(a) , a1* > = < ak+1 , a1* > = 0.
Conclusion : (a1*,tu) est la base duale de (a,u).
Si l'on se réfère au bilan de l'exercice 3 - 2 du chapitre IV, si (a,u) (ap+1 , ... , an) est une base de E, alors la famille (ap+1 , ... , an) sera une base de °G(a1*,tu), orthogonal de G(a1*,tu). Or, G(a1*,tu) est tu-stable donc, son orthogonal sera u-stable.
Théorème 4
Soit u un endomorphisme nilpotent d'indice p d'un K-ev de dimension finie n, 1 < p < n.
Alors il existe un vecteur a de E vérifiant up-1(a) 0E et une forme linéaire = (up-1(a))* de E* vérifiant tup-1() 0E* tels que E = F1 T, F1 = F(a,u), T = °G(,tu) étant deux sev u-stables de E.
II - 3. Exploitation du résultat
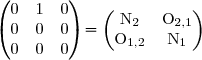
Le premier intérêt de ce résultat est que sur B(E) = (a,u) (ap+1 , ... , an), on aura :
Mat(u,B(E)) = Cette matrice est formée de deux blocs diagonaux Np et Bn-p,n-p. Le bloc Np étant la matrice canonique nilpotente d'ordre et d'indice p, le bloc Bn-p,n-p étant la matrice de la restriction de u à T sur la base préduale de (a1*,tu).
Ensuite, nommons v l'application induite par u sur T. Comme vp = O, v est nilpotent d'indice q, 1 q inf(n-p,p). On peut donc recommencer l'étude sur v. Ceci permet de décomposer le sev T en somme directe de deux sev v-stables (donc u-stables) T = F2 U. La matrice de la restriction de v à F2 étant du type Nq.
Ainsi, au bout d'un nombre fini d'opérations, on peut mettre en évidence une base B(E) de E sur laquelle la matrice de u sera formée de blocs diagonaux égaux à des matrices nilpotentes canoniques.
Mat(u,B(E)) = N =
Théorème 5
Pour tout élément nilpotent u de L(E), il existe une base B(E) telle que N = Mat(u,B(E)) se présente sous la forme d'une matrice bloc diagonale, dont les blocs diagonaux sont des matrices nilpotentes canoniques. Une telle matrice N s'appelle réduite de Jordan de u.
Remarquer que cette matrice est trigonale supérieure avec des 0 sur la diagonale : c'est une forme particulière de la trigonalisation avec pour avantage un résultat très "creux".
II - 4. Exemples élémentaires
a) n = 2 Alors, l'indice de nilpotence p de u est égal à 1 ou à 2.
Si p = 1, u = O. Donc, pour toute base B(E) de E,
Mat(u,B(E)) =
Si p = 2, alors pour tout vecteur a de E tel que u(a) 0E, la base B(E) = (u(a),a) donne
Mat(u,B(E)) = = N2.
b) n = 3 Alors, l'indice de nilpotence p de u est égal à 1,2 ou 3.
Si p = 1, u = O. Donc, pour toute base B(E) de E,
Mat(u,B(E)) =
Si p = 2, on prend un vecteur a tel que u(a) 0E. La décomposition E = F1 T, F1 = Vec(u(a) , a), met en évidence un sev T de E u-stable et de dimension 1. La restriction de u à T sera nilpotente d'indice 1, donc nulle. Finalement, sur une base B(E) adaptée, nous aurons :
Mat(u,B(E)) =
Si p = 3, on prend un vecteur a tel que u(a) 0E et B(E) = (u²(a) , u(a) , a),
Mat(u,B(E)) = = N3.
c) n = 4 Alors, l'indice de nilpotence p de u est égal à 1, 2, 3 ou 4.
Si p = 1, u = O. Donc, pour toute base B(E) de E,
Mat(u,B(E)) =
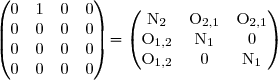
Si p = 2, on prend un vecteur a tel que u(a) 0E. La décomposition E = F1 T, F1 = Vec(u(a) , a), met en évidence un sev T de E u-stable et de dimension 2. La restriction de u à T sera nilpotente d'indice 1 ou 2. En appliquant les résultats trouvés lorsque n = 2, il y aura deux cas :
Mat(u,B(E)) = ou Mat(u,B(E)) =
Si p = 3, on prend un vecteur a tel que u²(a) 0E. La décomposition E = F1 T, F1 = Vec(u²(a) , u(a) , a), met en évidence un sev T de E u-stable et de dimension 1. La restriction de u à T sera nilpotente d'indice 1, donc nulle.
Mat(u,B(E)) =
Si p = 4, B(E) = (u3(a) , u2(a) , u(a) , a) donne :
Mat(u,B(E)) = = N4.
III - Utilisation
III - 1. Mode d'emploi si 1 < p < n
Soit u est nilpotent dans un K-ev E, B0 = (e1 , ... , en) une base de E, A = Mat(u,B0)
On calcule u2 , u3 , ... jusqu'à up-1 O et up = O (ou bien A2 , A3, ... )
On choisit a E tel que up-1(a) 0E. Si l'on dispose de A, A², ..., Ap-1, on choisit une colonne non nulle de Ap-1. Appelons Cj(p-1) = up-1(ej) cette colonne. Alors, en recopiant Cj(p-2), ..., Cj(1) et en posant a = ej, on obtient la famille (a,u) = (up-1(a) , up-2(a), ... , u(a) , a).
On complète (a,u) = (up-1(a) , up-2(a), ... , u(a) , a) = (a1 , ... , ap) en (a1 , ... , an) pour former une base B de E. Si P est la matrice de passage de B0 à B, on calcule P-1. On sait que les lignes de P-1 fournissent les coordonnées des vecteurs de la base B* duale de B. En particulier, la ligne 1 donnera la forme du théorème 3.
On calcule alors tu() , ... , tup-1() et l'on forme (,tu) = ( , tu(φ) , ... , tup-1())
On cherche °((,tu)) = T. Le plus souvent, on sera confronté à un système formé par des équations d'hyperplans indépendants.
On recommence avec l'endomorphisme v restriction de u à T.
III - 2. Exercice 1
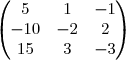
Soit A définie par A = , K = C. Réduire A.
A est la matrice d'un endomorphisme u de C3 dans la base canonique B0 = (e1 , e2 , e3).
On a facilement A² = O3, et comme A est non nulle, l'indice de nilpotence est p = 2.
Ce qui précède nous indique qu'il existe une base B' telle que A' = Mat(u,B') = . Cherchons B'.
a) Application du mode d'emploi Cherchons a tel que u(a) non nul : a = e1 convient. Donc a1 = u(a) = (1 , j , j²) et a2 = (1 , 0 , 0). Un troisième vecteur en complément, par exemple e2, donne une base B de C3. Soit P la matrice de passage de B0 à B. On sait que pour trouver la duale de B, on calcule tP-1. On a facilement :
P = et P-1 = Donc, a1* = (0 , 0 , j). Alors, tu(a1*) = (1 , j , j²) et G = Vec(a1*, tu(a1*)). Alors, les vecteurs (x , y , z) de °G vérifient :
jz = 0 et x + jy + jz = 0. Le vecteur a3 = (j , -1 , 0) convient.
Finalement la base B = (a1 , a2 , a3) telle que a1= (1 , j , j²), a2 = (1 , 0 , 0), a3 = (j , -1 , 0) donne la réduction souhaitée. On peut vérifier en calculant les images par u de ces trois vecteurs.
b) Méthode directe On peut chercher directement B' = (b1 , b2 , b3) en remarquant que l'on veut : u(b1) = 0, u(b2) = b1 et u(b3) = 0.
Ceci signifie que b1 et b3 sont dans Ker(u), qui est le plan d'équation x + jy + j²z = 0. On peut déjà choisir le vecteur b3 en prenant par exemple b3 = (1 , 1 , 1).
Si b2 = (x , y , z), alors, u(b2) = (x + jy + j²z , jx + j²y + z , j²x + y + jz) = (x + jy + j²z)(1 , j , j²) et si b1 = (a , b , c) alors la relation u(b2) = b1 impose à b1 d'être colinéaire à (1, j , j²). Donc, b2 est solution de x + jy + j²z = j. On peut donc choisir b2 = (0 , 1 , 0).
Finalement la base B' = (b1 , b2 , b3) telle que b1= (j , j² , 1), b2 = (0 , 1 , 0), b3 = (1 , 1 , 1) donne la réduction souhaitée.
III - 3. Exercice 2
Reprenons l'exemple I - 2 - c) : E = R3[X] et u : P P''. Nous avons vu que u est niloptent d'indice 2.
Comme u(X²) = 2, on peut prendre a = X² et F(a,u) = Vec(2,X²).
Adjoignons X et X³ pour former B(E) = (2 , X² , X , X³). La matrice de passage de la base canonique à B(E) est : P = . Alors, Son inverse est : .
Cette matrice inverse fournit les coordonnées de a1* sur la duale de la base canonique de R3[X] : On calcule tu(a1*) : (0 , 0 , 1 , 0). Donc, G(,tu) = Vec[ , (0 , 0 , 1 , 0)]. L'orthogonal T de G(,tu) est défini par les triplets (x , y , z , t) tels que : x = 0 et z = 0, on peut prendre T = Vec(X , X3).
Alors, si B'(E) = (2 , X2 , X , X3), nous aurons :
Mat(u , B'(E)) = Ici, la matrice de la restriction v de u à T est presque du type souhaité et l'on peut deviner rapidement la base de réduction. Si l'on s'en tient à la théorie, on étudie v de matrice A'. v est nilpotent d'incice 2. v(X3) étant non nul, on prend (v(X3) , X3) = (6X , X3). Alors, sur B''(E) = (2 , X2 , 6X , X3), on a :
Mat(u , B''(E)) =
III - 3. Exercice 3
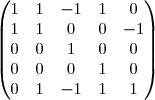
Considérons la matrice A = Appelons u l'endomorphisme dont A est la matrice dans la base canonique de R5.
Son polynôme caractéristique est A(X) = (X - 1)5. Donc, A n'est certainement pas nilpotente. Par contre, si l'on pose B = A - I5 alors, le théorème de Cayley-Hamilton donne B5 = O5. Ceci montre que l'on peut utiliser ce qui précède à B. Il suffira ensuite de revenir à A = I5 + B. Etudions donc B.
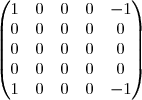
Nous avons :
B² = et B3 = O5.
B est nilpotente d'indice 3. Si B est la matrice de l'endomorphisme v de R5 dans la base canonique (e1 , ... , e5), nous avons v²(e1) = e1 + e5 , v(e1) = e2. Donc, (e1,v) = (e1+e5 , e2 , e1). On peut lui adjoindre (e3 , e4) pour former une nouvelle base de R5. On cherche la matrice de passage P et son inverse P-1. La première ligne de P-1 fournit la forme a1* = (0,0,0,0,1). Alors, en calculant tv(a1*) et tv²(a1*), on obtient (a1*,tu). L'orthogonal °G de G est caractérisé par x1 = x5 = 0 et x3 = x2 + x4. On peut donc prendre pour base de °G : e2+e3 , e3+e4.
Finalement une base de réduction de v est B = (e1+e5 , e2 , e1)(e2+e3 , e3+e4).
Alors, Mat(v,B) = Enfin, pour en revenir à la matrice de départ :
Mat(u,B) = Ce dernier exemple nous montre la voie de la réduction des endomorphismes scindés sur K.
IV - Réduction des endomorphismes scindés
IV - 1. Rappels
Soient E un K-ev de dimension finie N > 1, U un élément de L(E), Q un polynôme de K[X] annulé par U. En décomposant Q en facteurs premiers dans K[X] : Q = Q1 × ... × Qr le théorème de décomposition des noyaux indique que l'on a alors : E = Ker[Q1(U)] ... Ker[Qr(U)], les sev Ker[Qi(U)] étant U-stables.
En particulier, si U est scindé sur K, alors, son polynôme caractéristique est :
U(X) = (X - 1)n(1) ... (X - r)n(r) , avec 1 , ... , r distincts dans K et n(1) + ... + n(r) = N. Le théorème de Cayley-Hamilton donnant U(U) = O, on a la décomposition en sev U-stables :
E = Ker[(U - 1e)n(1)] ... Ker[(U - re)n(r)] = H1 ... Hr .
IV - 2. Utilisation
Appelons H = Ker(U - e)n l'un quelconque de ces Hi et, H étant U-stable, nommons u la restriction de U à H.
Alors, l'endomorphisme u - e L(H) est nilpotent puisque (u - e)n = O. On peut alors appliquer à u les paragraphes antérieurs. Il existe une base B(H) de H telle que :
Mat(u - e,B(H)) = N() = C'est la réduite de Jordan de l'endomorphisme nilpotent u - e.
Puis : Mat(u,B(H)) = = .Ip + N()
Naturellement, p = p1 + ... + pk = dim(H).
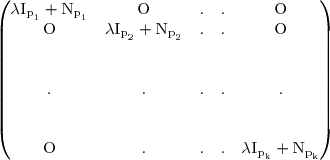
Définition 3
On appelle bloc de Jordan associé à la valeur propre λ la matrice J() = .Ip + N().
Il suffit alors d'appliquer ce résultat à chaque Hi = Ker(U - i.e)
Théorème 6
Pour tout élément u de L(E) scindé sur K, il existe une base B(E) telle que Mat(u,B(E)) se présente sous la forme d'une matrice bloc diagonale dont les éléments diagonaux sont des blocs de Jordan. Une telle réduction est appelée réduction de Jordan de u.
IV - 3. Exemple
Soit U l'endomorphisme de R6 dont la matrice dans la base canonique B = (e1 , ... , e6) est :
A = Mat(U,B) = Trouver une base de réduction sous la forme de Jordan.
Le calcul du polynôme caractéristique ne pose pas de problème : U(X) = (X-1)2(X-2)4. Alors, nous avons la décomposition R6 = Ker[(U-e)2] Ker[(U-2e)4] = H K, H et K étant U-stables.
a) Etude de la restriction u de U à H = Ker[(U-e)2] Nous avons :
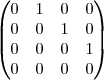
A - I6 = (A - I6)2 = L'équation (A - I6)2X = O donne facilement x3 = x4 = x5 = x6 = 0.
Donc une base de H = Ker[(U-e)2] est b = (e1 , e2), et, Mat(u-e,b) = , puis, Mat(u,b) = = I2 + N2.
b) Etude de la restriction v de U à K = Ker[(U-2e)4] Nous avons :
A - 2I6 = (A - 2I6)2 = (A - 2I6)3 = (A - 2I6)4 = L'équation (A - 2I6)4X = O donne le système : x1 - 4x2 + 2x3 = 0 et x2 - x3 + x4 + x5 + x6 = 0.
Remarquons que l'on a l'intersection de deux hyperplans indépendants, donc, dim(K) = 4, ce qui était attendu. Cherchons une base de K en prenant pour paramètres x3 , x4 , x5 , x6.
On peut choisir B(K) = (a1 , a2 , a3 , a4), avec :
a1(2,1,1,0,0,0) ; a2(-4,-1,0,1,0,0) ; a3(-4,-1,0,0,1,0) ; a4(-4,-1,0,0,0,1).
Alors, B = Mat(v,B(K) = On vérifie facilement que B² = O4, donc, v est nilpotent d'indice 2.
En regardant B, on voit que v(a2) = 2a1 est non nul. On peut donc prendre pour base (2a1 , a2) complétée par a3 et a4. La matrice de passage de (a1 , a2 , a3 , a4) à (2a1 , a2 , a3 , a4) et son inverse sont évidentes à chercher. On en déduit que la forme de la théorie est (1/2 , 0 , 0 , 0). Le calcul de tv() donne ((0,1,1,1).
Alors, °G est défini par les équations : x/2 = 0 et y + z + t = 0.
Prenons par exemple b3 = a2 - a4 et b4 = a3 - a4.
Une base de réduction est donc : B'(K) : b1 = 2a1 , b2 = a2 , b3 = a2 - a4 , b4 = a3 - a4.
Les calculs des v(bj) donne : Mat(v,B'(K)) = On voit bien apparaître ici le premier bloc N2 et le second bloc diagonal, restriction de v à °G.
Il reste à réduire ce second bloc diagonal C = .
Appelons w la restriction de v à Vec(b3 , b4). On a C² = O2. Donc, C est nilpotente d'indice 2 en dimension 2. La forme de C nous donne la base à choisir : B(°G) = (w(b3) , b3).
Mat(w,B(°G)) = = N2.
Remontons toutes les étapes. R6 = Ker(U-e)2 F1 °G. Les bases successives sont :
e1 , e2 ; 2a1 , a2 ; w(b3) , b3.
Cela donne (1,0,0,0,0,0) ; (0,1,0,0,0,0) ; (4,2,2,0,0,0) ; (-4,-1,0,1,0,0) ; (0,0,0-2,2,0) ; (0,0,0,1,0,-1).
Sur cette nouvelle base, la matrice de U est :
A' = .
IV - 4. Remarques
a) Réduire un endomorphisme scindé u sous la forme de Jordan demande un assez gros travail dès que dim(E) est importante, mais, comme pour la trigonalisation c'est souvent un outil théorique : on sait qu'il existe une base de E telle que ...
b) Soit u un endomorphisme scindé, T sa forme trigonale supérieure. On a alors T = D + E, où D est diagonale et E est nilpotente. Malheureusement, D.E et E.D sont en général distinctes. Par contre, dans la décomposition de Jordan, on aura J = D + N, D diagonale et N nilpotente, avec cette fois D.N = N.D. On démontre que c'est la seule décomposition permettant cette commutation : c'est le théorème de Dunford. Cette propriété permet par exemple de calculer l'exponentielle de u assez facilement.
Publié par Raymond
le
ceci n'est qu'un extrait
Pour visualiser la totalité des cours vous devez vous inscrire / connecter (GRATUIT) Inscription Gratuitese connecter
Merci à raymond pour avoir contribué à l'élaboration de cette fiche
Désolé, votre version d'Internet Explorer est plus que périmée ! Merci de le mettre à jour ou de télécharger Firefox ou Google Chrome pour utiliser le site. Votre ordinateur vous remerciera !
 O et up = O.
O et up = O.
 = \text{X}^{\text{p}}) . Son polynôme caractéristique sera donc :
. Son polynôme caractéristique sera donc :  = \text{X}^{\text{n}}) . On peut en déduire dès à présent que p
. On peut en déduire dès à présent que p  n.
n.
 L(E) défini par u(P) = P'', alors u
L(E) défini par u(P) = P'', alors u 



 . On vérifie que A² = O3.
. On vérifie que A² = O3.
) est nilpotente d'indice 3.
est nilpotente d'indice 3.
 (a,u) = (up-1(a) , up-2(a) , ... , u(a) , a).
(a,u) = (up-1(a) , up-2(a) , ... , u(a) , a).
 1 , ... ,
1 , ... ,  x = x1.up-1(a) + x2.up-2(a) + ... + xp-1.u(a) + xp.a
x = x1.up-1(a) + x2.up-2(a) + ... + xp-1.u(a) + xp.a
 F° sev de E* tu-stable
F° sev de E* tu-stable
 (a1*,tu) = (a1* , tu(a1*) , ... , tup-1(a1*)) est libre dans E*
(a1*,tu) = (a1* , tu(a1*) , ... , tup-1(a1*)) est libre dans E*
 j = tuj-1(a1*). Alors,
j = tuj-1(a1*). Alors,  (ap+1 , ... , an) est une base de E, alors la famille (ap+1 , ... , an) sera une base de °G(a1*,tu), orthogonal de G(a1*,tu). Or, G(a1*,tu) est tu-stable donc, son orthogonal sera u-stable.
(ap+1 , ... , an) est une base de E, alors la famille (ap+1 , ... , an) sera une base de °G(a1*,tu), orthogonal de G(a1*,tu). Or, G(a1*,tu) est tu-stable donc, son orthogonal sera u-stable.
 U. La matrice de la restriction de v à F2 étant du type Nq.
U. La matrice de la restriction de v à F2 étant du type Nq.

 = N2.
= N2.
 = N3.
= N3.
 ou Mat(u,B(E)) =
ou Mat(u,B(E)) = 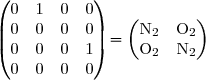
 = N4.
= N4.
 , K = C. Réduire A.
, K = C. Réduire A.
 . Cherchons B'.
. Cherchons B'.
 et P-1 =
et P-1 = 
 P''. Nous avons vu que u est niloptent d'indice 2.
P''. Nous avons vu que u est niloptent d'indice 2.
 . Alors, Son inverse est :
. Alors, Son inverse est :  .
.
)
 x = 0 et z = 0, on peut prendre T = Vec(X , X3).
x = 0 et z = 0, on peut prendre T = Vec(X , X3).
 A(X) = (X - 1)5. Donc, A n'est certainement pas nilpotente. Par contre, si l'on pose B = A - I5 alors, le théorème de Cayley-Hamilton donne B5 = O5. Ceci montre que l'on peut utiliser ce qui précède à B. Il suffira ensuite de revenir à A = I5 + B. Etudions donc B.
A(X) = (X - 1)5. Donc, A n'est certainement pas nilpotente. Par contre, si l'on pose B = A - I5 alors, le théorème de Cayley-Hamilton donne B5 = O5. Ceci montre que l'on peut utiliser ce qui précède à B. Il suffira ensuite de revenir à A = I5 + B. Etudions donc B.
 et B3 = O5.
et B3 = O5.
 1)n(1) ... (X -
1)n(1) ... (X - 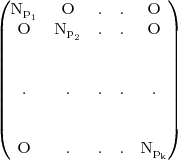
 =
= 
 = I2 + N2.
= I2 + N2.
 .
.
 .
.
 p, alors pour tout vecteur a de E tel que up-1(a)
p, alors pour tout vecteur a de E tel que up-1(a)  algèbre en post-bac
algèbre en post-bac