Dans ce chapitre, désigne un corps commutatif (en général: ou ).
I. Applications multilinéaires
1. Généralités
Définition :
Soient , des -ev.
Une application est dite multilinéaire ou plus précisément -linéaire si et seulement si est linéaire par rapport à chaque variable, c'est-à-dire :
, , , , , , , :
Si , on dit que est une forme-linéaire.
Si , on dit que est une application bilinéaire.
Proposition :
L'ensemble des applications -linéaires de vers est un -ev.
2. Application multilinéaire alternée
Soient un -ev, et
Définition :
Une application -linéaire est dite alternée si et seulement si, pour tout couple tel que , et pour tout :
On note l'ensemble de ces applications. Et si , on notera cet ensemble à la place de
Remarque : est l'ensemble des formes linéaires alternées sur le ev .
Proposition :
L'ensemble des formes linéaires alternées sur le ev de dimension est un ev de dimension .
Proposition :
Une application -linéaire est alternée si et seulement si: , :
Proposition :
Soient une application linéaire alternée, et .
Si est liée, alors
Proposition :
Si , alors la seule application linéaire et alternée de dans est l'application nulle.
II. Notion de déterminant
1. Déterminant d'une famille de vecteurs
Définition :
Soient une base de , une famille de vecteurs de .
On appelle déterminant de la famille dans la base le scalaire .
où : pour chaque , sont les composantes de dans :
Remarques : Si la formule est complexe, elle est néanmoins parfois utile et il est recommandé de la connaître.
.
Théorème :
Soit un ev de dimension muni d'une base .
L'application est une forme linéaire alternée non nulle.
Proposition :
Soit un ev de dimension muni d'une base L'application est linéaire en chacune de ses variables.
L'application s'annule sur les familles liées.
L'application est vecteur directeur de , c'est-à-dire: , :
Théorème : (Changement de base)
Soient et deux bases d'un ev de dimension .
: .
Remarque : Si et sont deux bases de , alors
Théorème : (Caractérisation des bases)
Soit un ev de dimension muni d'une base et soit une famille de vecteurs de .
Les propositions suivantes sont équivalentes :
(i) est une base de .
(ii).
2. Déterminant d'un endomorphisme
Théorème :
Soient un endomorphisme d'un ev de dimension et une base de , :
Définition :
Soient un endomorphisme d'un ev de dimension et une base de .
On appelle déterminent de et on note le scalaire:
Corollaire :
Le déterminant d'un endomorphisme d'un ev ne dépend pas du choix de la base de ce dernier.
Proposition :
Soit un ev de dimension , : .
: .
: .
: .
3. Déterminant d'une matrice carrée
Soit
Définition :
Soit . On appelle déterminant de, et on note ou , l'élément de défini par :
Remarque : On ne calcule le déterminant que de matrices carrées.
Proposition :
Soient un ev de dimension , une base de , une famille de vecteurs de , , on a:
Proposition :
Soient un ev de dimension , , une base de , , on a:
Remarque : Tout problème de calcul de déterminant d'un endomorphisme, ou d'une famille de vecteurs dans une base, se ramène à un problème de calcul de déterminant d'une matrice carrée.
Proposition:
, : .
: .
: .
: .
: .
III. Techniques de calcul des déterminants
1. Déterminants des matrices carrées d'ordre 2 et d'ordre 3
Remarque : Cette relation est très difficile à apprendre, néanmoins, il existe une méthode très simple pour retrouver ce résultat sans l'avoir en tête, c'est la règle de Sarrus
Règle de Sarrus pour le calcul des déterminants des matrices d'ordre 3 :
On écrit à droite de la matrice ses deux premières colonnes et on additionne les produits obtenus en multipliant les éléments sur les diagonales, pris avec le signe pour les produits qui sont parallèles à la diagonale principale et avec le signe pour les autres.
On obtient aisément :
Remarque : La règle de Sarrus reste valable pour les déterminants des matrices d'ordre 2...
La règle de Sarrus n'est pas applicable pour le calcul des déterminants des matrices d'ordre .
2. Développement par rapport à une rangée
Soit
Définition :
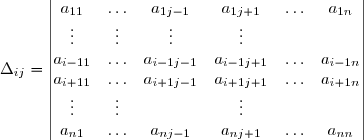
Soit .
Pour chaque , on appelle mineur de la placedans (ou encore, par abus de langage : mineur dedans), le déterminant d'ordre obtenu en supprimant dans la ligne et la colonne:
Pour chaque , on appelle cofacteur de la placedans (ou encore, par abus : cofacteur dedans), et on note , le produit de par le mineur de la place dans :
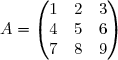
Exemple : Soit On a : et .
Proposition :(Développement par rapport à une rangée)
Soit . On a:
, (développement de par rapport à la colonne).
, (développement de par rapport à la ligne).
Exemple : Revenons à la matrice de l'exemple précédent: .
Il est clair que le développement par rapport à la ligne est le plus simple:
On peut continuer le calcul en utilisant la règle de Sarrus, mais nous allons continuer de développer jusqu'à des déterminants d'ordre 2 afin de mieux illustrer la méthode.
Développent par rapport aux lignes:
Enfin :
Remarques : La technique du développement d'un déterminant par rapport à une rangée permet de calculer tout les déterminants, quelque soit l'ordre de la matrice carrée.
Pour les matrices d'ordre supérieur, les calculs deviennent trop longs voire ennuyeux, c'est pourquoi nous allons introduire des méthodes de simplification qui permettront de calculer les déterminants d'une façon plus ou moins aisée.
3. Opérations sur les déterminants : simplifications
Proposition : (matrices carrées triangulaires)
Le déterminant d'une matrice carrée triangulaire (inférieure ou supérieure) est égal au produit des éléments diagonaux.
Conséquence : Le déterminant d'une matrice carrée diagonale est égal au produit des éléments diagonaux.
Exemples :
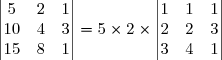
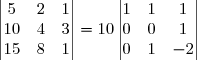
Proposition : (Opérations élémentaires):
L'utilisation de la multilinéarité du déterminant peut s'avérer utile, il se traduit schématiquement par:
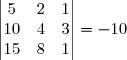
Pour que le déterminant d'une matrice soit nul, il faut et il suffit que la famille de colonnes de cette matrice soit liée. En particulier, si un déterminant a une colonne nulle, ou deux colonnes colinéaires, ce déterminant est nul. (Résultat analogue pour les lignes).
On ne change pas la valeur d'un déterminant en remplaçant une colonne par la somme de celle-ci et d'une combinaison linéaire des autres colonnes. (Résultat analogue pour les lignes).
On ne change pas la valeur d'un déterminant en remplaçant (simultanément) chaque colonne par la somme de celle-ci et d'une combinaison linéaire des colonnes suivantes. (Résultat analogue pour les lignes).
On ne change pas la valeur d'un déterminant en remplaçant (simultanément) chaque colonne par la somme de celle-ci et d'une combinaison linéaire des colonnes précédentes. (Résultat analogue pour les lignes).
On change le signe du déterminant en permutant deux colonnes.
Remarque : Par opérations élémentaires, on sait triangulariser une matrice et donc calculer son déterminant.
Exemple : Calcul de En factorisant et sur les deux premières colonnes:
En opérant sur les lignes : , on obtient:
Enfin :
4. Supplément : déterminant de Vandermonde
Définition :
Soient et . On appelle déterminant de Vandermonde, et on note , l'élément de défini par:
Proposition :
, :
Démonstration : Il suffit d'exécuter l'opération élémentaire sur les colonnes, et ceci en partant de et en remontant jusqu'à .
On obtient alors: Développons par rapport à la première ligne :
Factorisons par ligne :
. En répétant le processus : D'où le résultat.
Remarque : Le déterminant de Vandermonde est non nul ssi les sont deux à deux distincts.
IV. Notions liées aux déterminants
1. Comatrice
Soit
Définition :
Soit . On appelle comatrice de la matrice carrée d'ordre , notée , définie par :
Où est le cofacteur de la place dans .
Exemples : Soit , on a : .
Soit , on a :
Théorème :
:
Proposition :
:
2. Orientation d'un espace vectoriel réel de dimension finie
Soient et un ev de dimension . On note l'ensemble des bases de
Définitions :
On dit que deux bases et de sont :
de même sens ssi: de sens contraires ssi:
Définitions :
On appelle orientation de le choix, dans l'ensemble des bases de , de l'une des deux classes d'équivalence modulo la relation "est de même sens que". Les bases de cette classe sont dites dans ce cas directes, les autres bases (celles de l'autre classe) sont dites indirectes. On dit alors que est un ev orienté.
On convient que la base canonique de est directe (ce qui revient à un choix d'orientation dans )
On appelle axe toute droite vectorielle orientée.
Définitions - Proposition :
Soit . On dit que :
conserve l'orientation ssi , dans ce cas, pour toute base , est une base de même sens que .
change l'orientation ssi , dans ce cas, pour toute base , est une base de sens contraire de .
Publié par Panter
le
ceci n'est qu'un extrait
Pour visualiser la totalité des cours vous devez vous inscrire / connecter (GRATUIT) Inscription Gratuitese connecter
Merci à Panter pour avoir contribué à l'élaboration de cette fiche
Désolé, votre version d'Internet Explorer est plus que périmée ! Merci de le mettre à jour ou de télécharger Firefox ou Google Chrome pour utiliser le site. Votre ordinateur vous remerciera !
 désigne un corps commutatif (en général:
désigne un corps commutatif (en général:  ou
ou  ).
).
 un
un 
) est l'ensemble des formes
est l'ensemble des formes  linéaires alternées sur le
linéaires alternées sur le  ev
ev =1) .
.
 et
et  sont deux bases de
sont deux bases de \times det_{\mathcal{C}}(\mathcal{B}) = 1)
=1)
 ,
, ) :
: =\lambda^{n} det(A)) .
.
) :
: =det(A)det(B)) .
.
\Longleftrightarrow det(A)\not{=}0) .
.
) :
: =(det(A))^{-1}) .
.
=det(A)) .
.

=\begin{vmatrix}1&4\\2&9\end{vmatrix}=1\times9-4\times2=1)
=1)
=\begin{vmatrix}2&5&4\\1&2&9\\1&-1&3\end{vmatrix}=2\times 2\times 3 - 1\times 5\times 3- 1\times 2\times 4-2\times (-1)\times 9+1\times (-1)\times 4 +1\times 5 \times 9 = 48)
) pour les produits qui sont parallèles à la diagonale principale et avec le signe
pour les produits qui sont parallèles à la diagonale principale et avec le signe ) pour les autres.
pour les autres.

 .
.
 et
et  .
.
 ligne est le plus simple:
ligne est le plus simple:
=\begin{vmatrix}4&5&2&1\\-1&4&2&-1\\4&0&0&2\\0&0&1&1\end{vmatrix}=-\Delta_{43}+\Delta_{44}=\Delta_{44}-\Delta_{43}=\begin{vmatrix}4&5&2\\-1&4&2\\4&0&0\end{vmatrix}-\begin{vmatrix}4&5&1\\-1&4&-1\\4&0&2\end{vmatrix})
 lignes:
lignes:
=\begin{vmatrix}4&5&2\\-1&4&2\\4&0&0\end{vmatrix}-\begin{vmatrix}4&5&1\\-1&4&-1\\4&0&2\end{vmatrix}=4\begin{vmatrix}5&2\\4&2\end{vmatrix}-4\begin{vmatrix}5&1\\4&-1\end{vmatrix}-2\begin{vmatrix}4&5\\-1&4\end{vmatrix})
=4 (10-8)-4(-5-4)-2(16+5)=6)


 et
et  sur les deux premières colonnes:
sur les deux premières colonnes:
 , on obtient:
, on obtient:

 ,
, \in\mathbb{K}^{n}) :
: =\displaystyle \prod_{1\leq j< i\leq n} (x_{i}-x_{j}))
 sur les colonnes, et ceci en partant de
sur les colonnes, et ceci en partant de  et en remontant jusqu'à
et en remontant jusqu'à  .
.
=\begin{vmatrix}1&x_{1}&x_{1}^{2}&\ldots&x_{1}^{n-1}\\ \vline&\vdots&\vdots&&\vdots\\1&x_{n}&x_{n}^{2}&\ldots&x_{n}^{n-1}\end{vmatrix}=\begin{vmatrix}1&0&0&\ldots&0\\ 1&x_{2}-x_{1}&x_{2}(x_{2}-x_{1})&\ldots&x_{2}^{n-2}(x_{2}-x_{1})\\\vline&\vdots&\vdots&&\vdots\\ 1&x_{n}-x_{1}&x_{n}(x_{n}-x_{1})&\ldots&x_{n}^{n-2}(x_{n}-x_{1})\end{vmatrix})
=\begin{vmatrix} x_{2}-x_{1}&x_{2}(x_{2}-x_{1})&\ldots&x_{2}^{n-2}(x_{2}-x_{1})\\\vdots&\vdots&&\vdots\\ x_{n}-x_{1}&x_{n}(x_{n}-x_{1})&\ldots&x_{n}^{n-2}(x_{n}-x_{1})\end{vmatrix})
=(x_{2}-x_{1})(x_{3}-x_{1})\ldots (x_{n}-x_{1})\begin{vmatrix}1&x_{2}&x_{2}^{2}&\ldots&x_{2}^{n-2}\\ \vline&\vdots&\vdots&&\vdots\\1&x_{n}&x_{n}^{2}&\ldots&x_{n}^{n-2}\end{vmatrix}=\displaystyle \prod_{k=2}^{n}(x_{k}-x_{1})\begin{vmatrix}1&x_{2}&x_{2}^{2}&\ldots&x_{2}^{n-2}\\ \vline&\vdots&\vdots&&\vdots\\1&x_{n}&x_{n}^{2}&\ldots&x_{n}^{n-2}\end{vmatrix}=\prod_{k=2}^{n}(x_{k}-x_{1})) .
. )
=\prod_{k=2}^{n}(x_{k}-x_{1}) . V(x_{2},\ldots,x_{n})=\prod_{k=2}^{n}(x_{k}-x_{1}) . \prod_{k=3}^{n}(x_{k}-x_{2}) . V(x_{3},\ldots,x_{n})=\ldots)
 sont deux à deux distincts.
sont deux à deux distincts.
 , on a :
, on a : =\begin{pmatrix} 3&-4\\-2&5\end{pmatrix}) .
.
 , on a :
, on a : =\begin{pmatrix} -3&6&-3\\6&-12&6\\-3&6&-3\end{pmatrix})
) :
: =^{t}com(A).A=det(A)I_{n})
) :
: } ^{t}com(A))
 ev de dimension
ev de dimension  . On note
. On note ) l'ensemble des bases de
l'ensemble des bases de  des
des  est dite multilinéaire ou plus précisément
est dite multilinéaire ou plus précisément  est linéaire par rapport à chaque variable, c'est-à-dire :
est linéaire par rapport à chaque variable, c'est-à-dire :
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  :
:
=\lambda \phi (x_{1},\ldots,x_{i},\ldots,x_{n})+\phi (x_{1},\ldots,y_{i},\ldots,x_{n}))
 , on dit que
, on dit que  , on dit que
, on dit que ) des applications
des applications  vers
vers  est un
est un  est dite alternée si et seulement si, pour tout couple
est dite alternée si et seulement si, pour tout couple \in\lbrace 1,\ldots, n\rbrace^{2}) tel que
tel que  , et pour tout
, et pour tout \in E^{n}) :
:
=0)
) l'ensemble de ces applications. Et si
l'ensemble de ces applications. Et si )
 est un
est un  .
.
 ,
, \in E^{n}) :
: },\ldotes,x_{\sigma(n)})=\epsilon(\sigma)\phi(x_{1},\ldots,x_{n}))
) est liée, alors
est liée, alors =0)
}) , alors la seule application
, alors la seule application  dans
dans ) une base de
une base de ) une famille de vecteurs de
une famille de vecteurs de  dans la base
dans la base =det_{\mathcal{B}}(x_{1},\ldots,x_{n})=\displaystyle \sum_{\sigma\in\mathfrak{G}_{n}} \epsilon(\sigma) \prod_{i=1}^{n} a_{\sigma(i)i}) .
.
 ,
, _{1\leq i_{j}\leq n}) sont les composantes de
sont les composantes de  dans
dans 
 est une forme
est une forme  est linéaire en chacune de ses variables.
est linéaire en chacune de ses variables.
) ,
,  :
: 
) deux bases d'un
deux bases d'un =det_{\mathcal{C}}(\mathcal{B}).det_{\mathcal{B}}(x_{1},\ldots,x_{n})) .
.
\not{=}0) .
.
 un endomorphisme d'un
un endomorphisme d'un ) ,
, \in E^{n}) :
: ,\ldots,,u(x_{n}))=det_{\mathcal{B}}(u(e_{1}),\ldots,u(e_{n})) \phi(x_{1},\ldots,x_{n}))
) le scalaire:
le scalaire: ,\ldots,u(e_{n})))
=1)
) :
: =\lambda^{n} det(u)) .
.
) :
: =det(u)det(v)) .
.
\Longleftrightarrow det(u)\not{=}0) .
.
) :
: =(det(u))^{-1}) .
.
_{1\leq i,j\leq n}\in\mathcal{M}_{n}(\mathbb{K})) . On appelle déterminant de
. On appelle déterminant de  , et on note
, et on note ) ou
ou  , l'élément de
, l'élément de =\displaystyle \sum_{\sigma\in\mathfrak{G}_{n}} \epsilon(\sigma) \prod_{i=1}^{n} a_{\sigma(i)i})
) , on a:
, on a:
=det(A))
) ,
, ) , on a:
, on a:
=det(A))
_{1\leq i,j\leq 3}\in \mathcal{M}_{3}(\mathbb{K})) . On a :
. On a :
=a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33})
\in \lbrace 1,\ldots,n\rbrace^{2}) , on appelle mineur de la place
, on appelle mineur de la place ) dans
dans  dans
dans  d'ordre
d'ordre  obtenu en supprimant dans
obtenu en supprimant dans  ligne et la
ligne et la  colonne:
colonne:
 , le produit de
, le produit de ^{i+j}) par le mineur de la place
par le mineur de la place ^{i+j}\Delta_{ij})
_{ij}\in\mathcal{M}_{n}(\mathbb{K})) . On a:
. On a:
 ,
, =\displaystyle \sum_{i=1}^{n}a_{ij}A_{ij}) (développement de
(développement de  ,
, =\displaystyle \sum_{j=1}^{n}a_{ij}A_{ij}) (développement de
(développement de \in \mathbb{K}^{n}) . On appelle déterminant de Vandermonde, et on note
. On appelle déterminant de Vandermonde, et on note ) , l'élément de
, l'élément de =det((x_{i}^{j-1})_{1\leq i,j\leq n})=\begin{vmatrix}1&x_{1}&x_{1}^{2}&\ldots&x_{1}^{n-1}\\ \vline&\vdots&\vdots&&\vdots\\1&x_{n}&x_{n}^{2}&\ldots&x_{n}^{n-1}\end{vmatrix})
) , définie par :
, définie par :
=(A_{ij})_{ij}=\begin{pmatrix} A_{11}&\ldots&A_{1n}\\\vdots&&\vodts\\A_{n1}&\ldots&A_{nn} \end{pmatrix})
>0)
<0)
 est directe (ce qui revient à un choix d'orientation dans
est directe (ce qui revient à un choix d'orientation dans ) . On dit que :
. On dit que :
 conserve l'orientation ssi
conserve l'orientation ssi >0) , dans ce cas, pour toute base
, dans ce cas, pour toute base ) ,
, ) est une base de même sens que
est une base de même sens que <0) , dans ce cas, pour toute base
, dans ce cas, pour toute base  algèbre en post-bac
algèbre en post-bac