L'étude de la dualité nécessite quelques connaissances préalables.
La structure de K-espace vectoriel (en abrégé K-ev). La notion de sous-espace vectoriel (en abrégé sev).
Les familles liées, libres, génératrices, les bases, les dimensions, en particulier le corps de base K peut être vu comme un K-ev de dimension 1 dont la base canonique est BK = (1K) où 1K est le neutre multiplicatif de K.
La notion application linéaire d'un K-ev E vers un K-ev F, son noyau, son image.
En dimensions finies, la formule dim(E) = dim(Ker(f)) + dim(Im(f))
Le K-ev L(E,F) des applications linéaires de E vers F.
En dimensions finies, la matrice d'une application linéaire.
En dimensions finies, la formule : dim[L(E,F)] = dim(E) × dim(F)
Le symbole de Kronecker : ij = 1 si i = j et ij = 0 si i j.
I - 1 - 2. Les polynômes de Lagrange
Il sera intéressant de connaître ces polynômes pour certaines questions ultérieures.
Pour n > 1, considérons n éléments distincts de K : a1 , a2 , ... , an. Cherchons les n polynômes L1 , L2 , ... , Ln de degré commun n-1, définis de la manière suivante.
Pour chaque i, 1 i n, le polynôme Li a pour racines a1 , ... , ai-1 , ai+1 , ... , an et prend la valeur 1 en ai. Remarquons que ces conditions se résument en :
Li (aj) = ij pour tout couple (i,j).
De par ses racines : Li(X) = k.(X - a1) ... (X - ai-1)(X - ai+1) ... (X - an). D'autre part, la condition Li(ai) = 1 fournit la valeur de k :
Définition I - 1
Soient a1 , ... , an n scalaires distincts, n > 2.
On appelle polynômes de Lagrange associés à ces n scalaires, les n polynômes L1, L2 , ... , Ln définis par : pour tout couple (i,j), Li(aj) = ij.
Alors :
Il est assez simple de prouver que la famille (L1 , ... , Ln) est une base de Kn-1[X].
I - 1 - 3. Exemples préliminaires
Ex I - 1. E est le R-ev R3, a, b, c trois réels donnés. Considérons l'application u :
u : E R définie par u((x,y,z)) = ax + by + cz
Ex I - 2. E est le C-ev des applications continues de [0,1] dans C. Considérons l'application v :
v : E C définie par v(f) =
Ex I - 3. E = R[X] est le R-ev des polynômes, soit a un élément fixé de R. Considérons l'application w :
w : E R définie par w(P) = P(k)(a)
Ex I - 4. E un K-ev de dimension n > 0, BE = (e1 , ... , en) une base de E. Alors, tout élément x de E possède un unique n-uplet de coordonnées sur BE : (x1 , ... , xn) tel que :
Pour tout j compris entre 1 et n, considérons l'application pj :
pj : E K définie par pj(x) = xj = coordonnée n°j de x. pj s'appelle la j-ème projection par rapport à BE.
Ex I - 5. U un ouvert de Rn, a un point de U, f : U R une application différentiable en a. La différentielle de f en a est l'application daf : Rn R définie par :
Ces cinq exemples empruntés à des domaines très variés des mathématiques ont un point commun : les applications introduites sont linéaires de E vers K, K étant considéré comme un K-ev. On constate donc l'omniprésence de telles applications en mathématiques.
I - 2. Les grandes définitions
I - 2 - 1. Formes linéaires, espace dual, espace bidual
Définition I - 2
Soit E un K-ev.
On appelle forme linéaire sur E toute application linéaire de E dans K. Le K-ev L(E,K) de ces formes linéaires est appelé l'espace dual de E. On le note E*.
Comme E* = L(E,K) est aussi un K-ev, on peut alors considérer le K-ev L(E*,K) des formes linéaires de E* vers K. Ce sera l'espace des formes linéaires de E* vers K, donc l'espace dual de E*. On l'appelle le bidual de E et on le note E**.
Supposons E de dimension finie. Comme dim(K) = 1, en utilisant le résultat : dim[L(E,F)] = dim(E) × dim(F) on obtient dim(E*) = dim(E**) = dim(E).
Théorème I - 1
Si E est un K-ev de dimension finie, alors dim(E) = dim(E*) = dim(E**).
I - 2 - 2. Remarques
En dimension finie, cette égalité entre dim(E), dim(E*) et dim(E**) est remarquable. Par contre si dim(E) n'est pas finie, la situation n'est pas aussi simple. Prenons un exemple.
Ex I - 6. Soit E = R[X]. Pour chaque réel a, considérons l'application f (a) : E R définie par f(a)(P) = P(a).
On vérifie que, pour tout réel a, f(a) est une forme linéaire sur E. En effet, pour P et Q quelconques dans E, et u et v quelconques dans R :
f(a)(uP + vQ) = (uP + vQ)(a) = uP(a) + vQ(a) = uf(a)(P) + vf(a)(Q).
Etudions la famille (f(a))a R. On sait qu'une telle famille est libre ssi toute sous-famille finie est libre. Prenons donc n réels distincts : a1 , ... , an et étudions la famille (f(a1) , ... , f(an)) dans E*. Pour cela nous allons résoudre l'équation : dans laquelle les ui sont n réels inconnus et O* la forme linéaire nulle. Alors, pour tout polynôme P, on peut écrire : Cette dernière formule est vérifiée en particulier pour les polynômes de Lagrange L1 , ... , Ln associés aux ai. Cela donne, pour tout j tel que 1 j n :
Compte tenu de la formule Lj(ai) = ij , il reste : pour tout j tel que 1 j n, uj = 0.
Conclusion : la famille des formes linéaires (f(ai))1 < i < n est libre. Donc, la famille (f(a))a R est libre. Cela signifie que l'espace dual de R[X] contient une famille libre de cardinal celui de R, alors que R[X] possède "simplement" une base dénombrable.
I - 2 - 3. Crochet de dualité
Définition I - 3
Soit E un Kev, E* son dual.
Pour tout x dans E et toute u dans E*, on appelle crochet de dualité de x et u l'écriture : < x , u > = u(x)
Cette écriture est un moyen assez simple pour faire jouer un rôle à peu près symétrique entre E et E*. Il faut savoir revenir à u(x) chaque fois que l'on doute du calcul.
L'écriture u(x) = < u , x > préservant l'ordre est également utilisée. Elle présente certains avantages d'homogénéité dans les calculs, en particulier en calcul matriciel. Mais comme la tradition l'impose je n'utiliserai que la notation de la définition I - 3.
On rencontre également la notation y* (au lieu de u) pour désigner un élément de E* et la notation z** pour un élément de E**. Alors < x , y* > = y*(x). Remarquons que E** étant le dual de E*, le crochet de dualité peut aussi se définir entre y* et z** : < y* , z** > = z**(y*).
En reprenant l'exemple I - 4, nous aurons, pour tout x dans E, < x , pj > = xj (coordonnée n°j de x). En particulier, en appliquant les projecteurs aux vecteurs de la base :
Pour tout couple (i,j) dans {1,2,...,n}², < ei , pj > = ij
Considérons l'application F : E × E* K définie par F(x,u) = < x , u > .
Soient a et b deux éléments de K, x et y deux éléments de E, u et v deux éléments de E*. Alors :
F(ax+by,u) = < ax+by , u > = u(ax+by) = au(x) + bu(y) = a< x , u > + b< y , u > = aF(x,u) + bF(y,u).
F(x,au+bv) = < x , au+bv > = (au + bv)(x) = au(x) + bv(x) = a< x , u > + b< x , v > = aF(x,u) + bF(x,v).
Cette linéarité par rapport aux deux variables donne le résultat suivant :
Théorème I - 2
L'application F : E × E* K définie par F(x,u) = < x , u > est bilinéaire (linéaire par rapport à chaque variable). Par abus de langage on dit que : le crochet de dualité est bilinéaire.
I - 3. Etude en dimension finie
I - 3 - 1. Isomorphismes
On sait que deux K-ev E et F de dimensions finies sont isomorphes ssi dim(E) = dim(F). La situation la plus intéressante est lorsque l'on peut construire entre E et F un isomorphisme indépendant des bases. Un tel isomorphisme est dit "canonique" et dans ce cas E et F "se ressemblent" tellement que l'on peut les confondre.
Considérons un K-ev E de dimension n > 0. Comme dim(E*) = dim(E**) = n, les espaces E, E* et E** sont nécessairement isomorphes. Cependant, on montre que E et E* ne sont jamais canoniquement isomorphes sauf dans quelques cas exceptionnels : dim(E) = 1 ou dim(E) = 2 et K = Z/2Z ou si E est euclidien. Par contre, occupons nous de E et de E**.
Pour x dans E, considérons l'application fx : E* K définie par fx(u) = u(x) = < x , u >. Par linéarité du crochet suivant la variable u, on voit que fx est une forme linéaire sur E*, donc, fx est élément de E**. Nous disposons donc d'une application T : E E** définie par T(x) = fx. Remarquons que T possède la propriété suivante :
pour tout u dans E*, T(x)(u) = fx(u) = u(x) = < x , u >.
Linéarité de T. Soient a et b quelconques dans K, x et y quelconques dans E. Pour toute forme linéaire u dans E* on a : T(ax+by)(u) = < ax+by , u > = a< x , u > + b< y , u > (linéarité du crochet de dualité par rapport à la première variable) donc : T(ax+by)(u) = aT(x)(u) + bT(y)(u) = [aT(x) + bT(y)](u). Cette égalité étant vraie pour tout u dans E*, cela donne : T(ax+by) = aT(x) + bT(y). Ceci montre que T est bien linéaire.
Injectivité de T. x Ker(T) T(x) = O** (forme nulle du bidual). Ceci entraine que, pour tout élément u dans E*, on aura alors : T(x)(u) = u(x) = 0 (dans K). En résumé, si x appartient à Ker(T) il doit avoir une image nulle sur tous les éléments de E*. En particulier, en choisissant une base B de E et la famille des projecteurs ( pj) associés (Ex I - 4), x doit annuler tous les projecteurs pj, 1 j n. Donc, pour tout j, pj(x) = xj = 0. Toutes les coordonnées de x sont nulles et finalement x = 0. Conséquence, Ker(T) = {0} et T est injective. Comme en plus, dim(E) = dim(E**), T sera aussi surjective. Finalement T est bien un isomorphisme canonique entre E et E** (le choix momentané d'une base B de E dans la preuve précédente n'est pas intervenu dans la construction de T).
Théorème I - 3
Tout K-ev E de dimension finie est canoniquement isomorphe à son bidual E**. L'isomorphisme canonique T : E E** est défini par : u E*, T(x)(u) = u(x) = < x , u >.
On peut également écrire :
x E, u E*, < u , T(x) > = < x , u >.
Comme nous le signalions, nous pouvons donc confondre E et E**. En fait, on identifie x avec T(x) = x**. Au niveau du crochet de dualité, cela revient à "retourner" l'écriture. En clair :
y* E*, x** E** , < y* , x** > = < x , y* >, avec x** = T(x) identifié à x.
I - 3 - 2. Bases duales
Définition I - 4
Soient E un K-ev de dimension n > 0, E* son espace dual, BE = (e1 , ... , en) une base de E et BE* = (1 , ... , n) une base de E* (les j sont donc des formes linéaires).
On dit que ces deux bases sont duales si et seulement si : pour tout couple (i , j), 1 i , j n, j(ei) = < ei , j > = ij.
On dit aussi que BE* est la base duale de BE et que BE est la base préduale de BE*.
Lorsque deux bases BE et BE* sont duales, on adopte très souvent les notations suivantes. Pour indiquer que ces deux bases sont liées, on pose : BE* = (BE)* et, pour tout j, 1 j n, j = ej*. Donc :
La base duale de BE = (e1 , ... , en) sera notée : (BE)* = (e1*, ... , en*).
Alors, la condition fondamentale, que nous appelerons (BD) pour bases duales, s'écrira :
(BD) : (i,j), 1 i , j n, ej*(ei) = < ei , ej* > = ij
Ne pas oublier que les ei* sont des formes linéaires. Remarquer que l'exemple Ex I - 4 nous assure l'existence de la base duale issue d'une base BE de E. Les ej* sont simplement les projecteurs associés à BE.
Remarque importante. Dans Kn, la duale de la base canonique est la base canonique de (Kn)*.
I - 3 - 3. Intérêt des bases duales
Supposons E muni d'une base BE = (e1 , ... , en) et son dual muni d'une base BE* = (f1 , ... , fn). Alors, pour tout x dans E et tout u dans E*, on aura :
Le calcul de u(x) = < x , u > donnera par bilinéarité :
Ce qui donne quand même n² termes ! Par contre, si les deux bases sont duales, seuls les termes où i = j restent. Donc, on obtient le résultat fondamental suivant :
Théorème I - 4
E et E* étant munis de leurs bases duales BE = (e1 , ... , en) et (BE)* = (e1* , ... , en*), si x E a pour coordonnées x1 , ... , xn sur BE et si u E* a pour coordonnées u1 , ... , un sur (BE)* alors :
u(x) = < x , u > = u1x1 + u2x2 + ... + unxn , avec ui = < ei , u > et xi = < x , ei* >
Cette formule ne contient plus que n termes.
Remarque. La symétrie entre ui = < ei , u > = u(ei) et xi = < x , ei* > = ei*(x) est très utile. Ces deux formules sont fondamentales pour trouver les coordonnées de x sur BE ou de u sur (BE)*. Nous verrons plus loin quelques applications.
Théorème I - 5
Si E et E* sont munis de bases duales BE = ( ei ) et (BE)* = (ei*),
alors les coordonnées de tout vecteur x de E sont données par xi = ei*(x) = < x , ei > et les coordonnées de toute forme linéaire u de E* sont données par ui = u(ei) = < ei , u >.
I - 4. Etude matricielle
I - 4 - 1. Matrice d'une forme linéaire
Soit u E*, c'est une application linéaire de E dans K. On peut donc chercher sa matrice M(u) en prenant une base de E : BE = (e1 , ... , en) et la base canonique BK = (1) de K. Nous supposerons que, sauf exception, K sera toujours muni de cette base et nous ne le mentionnerons plus. Nous savons que les colonnes de M(u) seront les coordonnées des u(ej) sur BK. Comme u(ej) = aj est un scalaire, M(u) aura la forme suivante :
M(u) = Mat(u , BE , BK) = Mat(u , BE) = (a1 ... aj ... an) : matrice uniligne.
Alors, si < x , u > = u(x) = : on retrouve la formule obtenue par les bases duales.
I - 4 - 2. Les deux interprétations matricielles d'une forme linéaire
Soit u un élément de E*. Il convient de ne pas confondre les deux notions suivantes :
a) la forme linéaire u considérée comme un vecteur de E*
Si BE* = (f1 , ... , fn) est une base de E*, alors, on aura : et on représente classiquement u sous forme d'un vecteur colonne par rapport à BE* :
b) la forme linéaire u considérée comme une application linéaire de E dans K
Dans ce cas, c'est une base BE de E que l'on choisit et nous avons vu que M(u) = Mat(u , BE) est une matrice uniligne : M(u) = Mat(u , BE) = (a1 ... aj ... an).
Nous voyons donc que les écritures en colonne ou ligne sont différentes, et en plus, les coordonnées sont également distinctes. Cependant, si l'on prend pour bases de E et de E*, deux bases duales, alors les coordonnées seront les mêmes puisque dans ce cas u(ej) = aj = uj. Donc si U désigne la matrice colonne des coordonnées de u sur (BE)* et si M(u) désigne la matrice de u sur BE alors M(u) = tU
Théorème I - 6
Soit E un K-ev de dimension n > 0. On suppose que E et E* sont munis de bases duales BE et (BE)*.
Alors, pour toute forme linéaire u, en appelant U la matrice colonne des coordonnées de u sur (BE)* et M(u) = Mat(u , BE) nous aurons : M(u) = tU.
On retrouve alors : < x , u > = M(u).X = tU.X = u1x1 + u2x2 + ... + unxn .
I - 4 - 3. Généralisation
A = (aij) MK(p,q) et B = (bij) MK(q,r), deux matrices. Considérons leur produit A.B = (pij) MK(p,r).
Désignons par L1(A) , ... , Lp(A) les lignes de A et par C1(B) , ... , Cr(B) les colonnes de B.
Li(A) = (ai1 , ... , aiq) peut être vue comme la matrice d'une forme linéaire sur Kq muni de sa base canonique.
Cj(B) = peut être vue comme la matrice d'un vecteur de Kq muni de sa base canonique.
Alors : C'est là que la notation "renversée" du crochet de dualité serait plus adaptée ! On aurait en effet une formule plus dans l'ordre : pij = < Li(A) , Cj(B) >. Gardons quand même la notation la plus répandue.
Théorème I - 7
A = (aij) MK(p,q) , B = (bij) MK(q,r) et A.B = (pij) MK(p,r).
Si l'on désigne par Cj(B) la colonne n°j de B et par Li(A) la ligne n°i de A, alors, le terme générique du produit A.B est donné par la formule : pij = Li(A)[Cj(B)] = < Cj(B) , Li(A) > : image du vecteur colonne n°j de B par la forme linéaire ligne n°i de A.
I - 4 - 4. Recherche de bases duales par les coordonnées
Considérons Kn muni de sa base canonique B et son dual (Kn)* muni de sa base canonique B*. On sait que B* est la duale de B, donc B* = (B)*. L'un des problèmes les plus classiques est le suivant : étant donnée une nouvelle base B' de Kn, trouver sa duale (B')*.
Cette autre base B' = (e1 , ... , en) de Kn, est le plus souvent donnée par les coordonnées des ej sur la base canonique B. Appelons (p1j , ... , pnj) les coordonnées de ej sur B. Alors, comme d'habitude, les colonnes de la matrice de passage P de B à B' seront ces coordonnées, donc P = (pij).
Soit (B')* = (e1* , ... , en*) la duale de B'. Appelons Q = (qij) la matrice de passage de (B)* à (B')*. La colonne n°i de Q représente les coordonnées de ei* sur (B)*. En transposant : la ligne n°i de tQ est la ligne des coordonnées de ei* sur (B)*. Posons tQ.P = (rij) et appliquons maintenant le théorème I - 7.
rij = < Cj(P) , Li(tQ)> = < ej , ei* > = ij. Donc tQ.P = In.
Ceci donne deux formules très intéressantes, suivant que l'on cherche la duale (B')* connaissant B' ou que l'on cherche la préduale B' connaissant sa duale (B')* :
Théorème I - 8
Soient B la base canonique de Kn, B' = (e1 , ... , en) une autre base de Kn, P la matrice de passage de B à B'. Soient (B)* et (B')* leurs bases duales dans (Kn)*, Q la matrice de passage de (B)* à (B')*.
Alors : tQ.P = In. Donc, suivant la base cherchée : Q = ( tP )-1 ou P = ( tQ)-1.
I - 4 - 5. Exemple
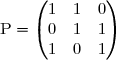
Dans E = R3, on donne : e1 = (1,0,1) ; e1 = (1,1,0) ; e3 = (0,1,1). Trouver la base duale (B')* de B' = (e1 , e2 , e3 ).
On vérifie rapidement que B' est bien une base de E. La matrice de passage de la base canonique B à B' est :
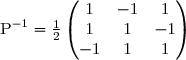
On en déduit facilement P-1 et t(P-1) :
Il suffit de lire les colonnes de t(P-1) (ou mieux encore, les lignes de P-1 ) :
e1* = ; e2* = ; e3* = donne la base duale.
I - 5. Bases duales classiques
I - 5 - 1. Résumé
E un K-ev de dimension n > 0, BE = (e1 , ... , en) une base de E, BE* = (f1 , ... , fn) une base de son dual E*. Ces deux bases sont duales ssi (i,j), < ei , fj > = ij. Dans ce cas, on pose BE* = (BE)* et fj = ej*.
La condition (BD) est : < ei , ej* > = ij.
De plus, pour tout x dans E, les coordonnées de x sur BE sont les scalaires xi = < x , ei* > = ei*(x), et pour toute forme u dans E*, les coordonnées de u sur (BE)* sont les scalaires ui = < ei , u > = u(ei).
Enfin, < x , u > = u(x) = u1x1 + u2x2 + ... + unxn.
Si E = Kn, la base canonique de E et la base canonique de E* sont duales.
I - 5 - 2. Bases de Lagrange
Soit E = Kn[X], n > 0, le K-ev de dimension n+1 constitué des polynômes de degré n et du polynôme nul. Appelons a0 , a1 , ... , an n+1 éléments distincts de K (si K est fini, certaines restrictions sur n s'imposent). Considérons alors les n+1 formes linéaires f0 , f1 , ... , fn de E* définies par : fj(P) = P(aj).
D'après l'exemple I - 6, nous savons que ces n+1 formes linéaires sont indépendantes. Comme dim E* = n+1, ces n+1 formes constituent une base (BE)* du dual. Cherchons sa préduale BE dans E. Pour cela revenons au paragraphe I - 1 - 2 et introduisons les n+1 polynômes de Lagrange L0 , L1 , ... , Ln associés à a0 , a1 , ... , an. Ces polynômes sont tous de même degré n, donc dans E. Par définition, Li admet ai pour racine et s'annule sur tous les autres aj. Donc : Li(aj) = ij . Cette égalité s'écrit aussi : fj(Li) = < Li , fj > = ij. C'est la condition (BD).
Théorème I - 9
Soient a0 , a1 , ... , an , n+1 éléments distincts de K, n > 1.
Alors, les n+1 formes linéaires f0 , f1 , ... , fn définies sur Kn[X] par fi(P) = P(ai) forment une base de (Kn[X])* : (BE)* = (f0 , f1 , ... , fn).
La préduale de cette base est : BE = (L0 , L1 , ... , Ln) où les Li sont les polynômes de Lagrange associés à a0 , a1 , ... , an.
Remarque 1 : Conformément à ce qui a été rappelé, les coordonnées d'un polynôme P de Kn[X] sur cette base de Lagrange sont simples à trouver : ce sont les < P , fi > = P(ai). Donc :
Pour tout P dans Kn[X], P(X) = P(a0).L0(X) + P(a1).L1(X) + ... + P(an).Ln(X).
Remarque 2 : Soit f une fonction de R vers R dont on connait les valeurs en n+1 points distincts a0 , a1 , ... , an de son domaine de définition. La fonction polynômiale P de degré n coïncidant avec f en ces n+1 points est donnée par la formule : P(x) = f(a0).L0(X) + f(a1).L1(X) + ... + f(an).Ln(X).
I - 5 - 3. La formule de Taylor
Prenons E = Kn[X]. On peut définir sur E une dérivation formelle.
Définition I - 5
Soit P dans Kn[X].
On appelle polynôme dérivé de P(X) le polynôme P '(X) coefficient du terme en Y dans le développement de P(X+Y) par rapport à l'indéterminée Y.
Naturellement, cette définition coïncide avec la dérivation définie dans R ou C par les limites. Cette définition itérée permet de calculer les dérivées de tous ordres de P : P''(X), ... P(k)(X), ... .
Choisissons un élément a de K et considérons la famille BE = (p0 , p1 , ... , pn) de E définie par pi(X) = (X-a)i avec la convention p0(X) = 1. Cette famille, échelonnée par les degrés, est libre. Son cardinal coïncidant avec la dimension de E, BE est une base de E. Cherchons sa duale (BE)*. Pour cela, revenons à l'exemple préliminaire I - 3 : considèrons les n+1 formes linéaires f définies par : pour tout P dans E, < P , fj > = fj(P) = P(j)(a).
Calculons < pi , fj > = (pi)(j)(a).
- Si j > i, l'ordre de dérivation étant strictement supérieur au degré, < pi , fj > = 0
- Si j < i, (pi)(j)(X) contiendra encore le facteur (X-a), donc (pi)(j)(a) = 0 et < pi , fj > = 0
- Si j = i, alors, comme ( (X-a)i )(i) = i !, nous aurons < pi , fi > = 1.
Conclusion : on retrouve la condition (BD) : < pi , fj > = ij.
Théorème I - 10
Soit a un élément de K.
Pour n > 0, on munit Kn[X] de la base BE = (p0 , p1 , ... , pn), donnée par pi(X) = (X-a)i.
Alors, la base duale de BE est (BE)* = (f0 , f1 , ... , fn) où fj est définie par : pour tout P dans Kn[X], fj(P) = (P)(j)(a).
Remarque : Soit P(X) un élément quelconque de Kn[X]. Nous savons que ses coordonnées sur BE sont données par les < P , fj > = fj(P) = (P)(j)(a) . On en déduit la décomposition de P(X) sur BE qui est la formule de Taylor :
Désolé, votre version d'Internet Explorer est plus que périmée ! Merci de le mettre à jour ou de télécharger Firefox ou Google Chrome pour utiliser le site. Votre ordinateur vous remerciera !
 i
i (a_i - a_2) ... (a_i - a_{i-1})(a_i - a_{i+1}) ... (a_i - a_n)})
 R définie par u((x,y,z)) = ax + by + cz
R définie par u((x,y,z)) = ax + by + cz
dt)
 P(k)(a)
P(k)(a)

 = \displaystyle \sum_{i=1}^n \frac{\partial f}{\partial x_i}(a).h_i)
 R. On sait qu'une telle famille est libre ssi toute sous-famille finie est libre. Prenons donc n réels distincts : a1 , ... , an et étudions la famille (f(a1) , ... , f(an)) dans E*. Pour cela nous allons résoudre l'équation :
R. On sait qu'une telle famille est libre ssi toute sous-famille finie est libre. Prenons donc n réels distincts : a1 , ... , an et étudions la famille (f(a1) , ... , f(an)) dans E*. Pour cela nous allons résoudre l'équation :  = O^*) dans laquelle les ui sont n réels inconnus et O* la forme linéaire nulle. Alors, pour tout polynôme P, on peut écrire :
dans laquelle les ui sont n réels inconnus et O* la forme linéaire nulle. Alors, pour tout polynôme P, on peut écrire :  = \displaystyle \sum_{i=1}^n u_iP(a_i) = 0](https://latex.ilemaths.net/latex-0.tex?\left[\displaystyle \sum_{i=1}^n u_i f(a_i) \right](P) = \displaystyle \sum_{i=1}^n u_iP(a_i) = 0)
 = 0)
 ij , il reste : pour tout j tel que 1
ij , il reste : pour tout j tel que 1  T(x) = O** (forme nulle du bidual). Ceci entraine que, pour tout élément u dans E*, on aura alors : T(x)(u) = u(x) = 0 (dans K). En résumé, si x appartient à Ker(T) il doit avoir une image nulle sur tous les éléments de E*. En particulier, en choisissant une base B de E et la famille des projecteurs ( pj) associés (Ex I - 4), x doit annuler tous les projecteurs pj, 1
T(x) = O** (forme nulle du bidual). Ceci entraine que, pour tout élément u dans E*, on aura alors : T(x)(u) = u(x) = 0 (dans K). En résumé, si x appartient à Ker(T) il doit avoir une image nulle sur tous les éléments de E*. En particulier, en choisissant une base B de E et la famille des projecteurs ( pj) associés (Ex I - 4), x doit annuler tous les projecteurs pj, 1  x
x  j = ej*. Donc :
j = ej*. Donc :

=\left(\begin{array}{c} \text{x}_1\\ \vdots \\ \text{x}_i \\ \vdots \\ \text{x}_n\end{array}\right))
 = M(u) X = (a_1\ ...\ a_j\ ...\ a_n)\left(\begin{array}{c} \text{x}_1\\ \vdots \\ \text{x}_i\\ \vdots \\ \text{x}_n\end{array}\right))
 : on retrouve la formule obtenue par les bases duales.
: on retrouve la formule obtenue par les bases duales.

 = \begin{pmatrix}u_1\\ . \\ . \\ \\u_j\\ . \\ . \\ \\ u_n\end{pmatrix})
 peut être vue comme la matrice d'un vecteur de Kq muni de sa base canonique.
peut être vue comme la matrice d'un vecteur de Kq muni de sa base canonique.
 , L_i(A) >)
 = \frac{1}{2}\begin{pmatrix} 1& 1&-1\\-1& 1& 1\\ 1&-1& 1\end{pmatrix})
) ; e2* =
; e2* = ) ; e3* =
; e3* = ) donne la base duale.
donne la base duale.
 P(j)(a).
P(j)(a).
 (P)(n)(a).(X-a)n.
(P)(n)(a).(X-a)n.j.
 = \displaystyle \prod_{j=1,j\neq{i}}^n \left(\frac{X-a_j}{a_i-a_j}\right) = \frac{(X-a_1) ... (X-a_{i-1})(X-a_{i+1}) ... (X-a_n)}{(a_i-a_1) ... (a_i-a_{i-1})(a_i-a_{i+1}) ... (a_i-a_n)})
 1 , ... ,
1 , ... ,  algèbre en post-bac
algèbre en post-bac