Cherchons une méthode simple pour réduire toutes les matrices d'ordre n > 1, et de rang 1. Le corps de base sera K = ou .
Nous poserons A = Mat(f, B0) où B0 = (a1, ... , an) désigne la base canonique de Kn.
I. Forme générale de A
Rg(A) = 1 signifie que toutes les colonnes de A : C1, ... , Cn sont liées et non toutes nulles puisque A O. On peut donc écrire que A = (v1U, ... , vnU) où les vj sont des scalaires non nuls et U = .
En posant V = , on voit que : A = U. t(V). U et V sont deux vecteurs non nuls et (A)ij = uivj.
II. Calcul de A2
L'associativité et le fait que tX.Y soit un scalaire rendent le calcul de A2 particulièrement simple.
A2 = UtVUtV = (tVU)UtV = A = tr(A) A. D'où le résultat très intéressant : A2 = tr(A).A
On remarque de suite qu'il faudra distinguer les cas tr(A) nul ou non.
III. tr(A) non nulle
Dans ce cas, P(X) = X2 - tr(A)X est un polynôme annulateur de A. Comme A est ni nulle ni égale à tr(A)In, on peut dire que P(X) est le polynôme minimal de A. Comme il est scindé à racines simples, A est diagonalisable. Passons aux éléments propres.
a) Le sous-espace associé à la valeur propre 0 est H = Ker(A) qui est un hyperplan de Kn. (rg(A) = 1).
On dispose ainsi de l'équation de l'hyperplan H.
b) Le sous-espace propre associé à la valeur propre tr(A), que nous nommerons D, est une droite vectorielle. Cherchons une base de D. AU = UtVU = (tVU)U = tr(A)U ; ceci prouve que U est un vecteur propre associé à la valeur propre tr(A). Donc : D = Vect(U).
Conclusion. En prenant une base B1 = (U,e2, ... ,en), (e2, ..., en) étant une base de H, nous aurons :
A1 = Mat(f,B1) = avec a = tr(A).
IV. tr(A) = 0
Dans ce cas, A2 = O : la seule valeur propre possible de A est 0. Comme A est non nulle, A n'est pas diagonalisable. De toute façon, X2 est le polynôme minimal de A et il n'est pas à racines simples. On a toujours Ker(A) = H, hyperplan, mais cette fois, il convient de remarquer que tr(A) = 0 signifie que U vérifie l'équation de H, donc U est dans le noyau. Il n'est donc plus question de choisir une base du style B1. Intéressons nous à V. AV = UtVV = (tV.V)U = ||V||2U. (La notation sous forme de norme est licite si K = , par contre, ce n'est qu'une écriture si K =). Ceci nous amène à étudier séparément les deux cas.
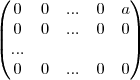
a) On suppose que K = . , donc AV 0 : V n'est pas dans Ker(A). D'où l'idée de choisir une nouvelle base : B' = (U, e3, ... , en, V) où (U, e3, ... , en ) constitue une base de H = Ker(A). Comme , on aura :
A' = Mat(f,B') = .
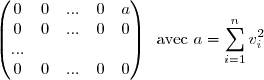
b) Si K = on n'est plus assuré de la non nullité de , il faut donc trouver une autre base. Gardons U, e3, ... , en base de H et cherchons un dernier vecteur pour former une base B". Reprenons les vecteurs aj de la base canonique, nous savons que Aaj = Cj = vjU (colonne n°i de A). Or, A étant non nulle au moins une colonne est non nulle. Soit j tel que Cj non nulle. Posons B" = (U, e3 , ... , en , aj). Alors :
A" = Mat(f,B") = avec a = vj Cette dernière forme est plus générale que A' puisqu'elle s'applique dans tous les cas où tr(A) = 0.
Remarque. On peut utiliser ce dernier résultat pour chercher une base de réduction de la matrice A définie par :
étant une racine nième de l'unité non réelle. Pour cela, on remarquera que A = UtV, avec U = V = .
Publié par raymond
le
ceci n'est qu'un extrait
Pour visualiser la totalité des cours vous devez vous inscrire / connecter (GRATUIT) Inscription Gratuitese connecter
Merci à raymond pour avoir contribué à l'élaboration de cette fiche
Désolé, votre version d'Internet Explorer est plus que périmée ! Merci de le mettre à jour ou de télécharger Firefox ou Google Chrome pour utiliser le site. Votre ordinateur vous remerciera !
 ou
ou  .
Nous poserons A = Mat(f, B0) où B0 = (a1, ... , an) désigne la base canonique de Kn.
.
Nous poserons A = Mat(f, B0) où B0 = (a1, ... , an) désigne la base canonique de Kn.
 O. On peut donc écrire que A = (v1U, ... , vnU) où les vj sont des scalaires non nuls et U =
O. On peut donc écrire que A = (v1U, ... , vnU) où les vj sont des scalaires non nuls et U =  .
.
 , on voit que : A = U. t(V). U et V sont deux vecteurs non nuls et (A)ij = uivj.
, on voit que : A = U. t(V). U et V sont deux vecteurs non nuls et (A)ij = uivj.
) A = tr(A) A. D'où le résultat très intéressant : A2 = tr(A).A
A = tr(A) A. D'où le résultat très intéressant : A2 = tr(A).A
\text{U} = O \Longleftrightarrow \left(\displaystyle \sum_{i=1}^nv_ix_i\right)\text{U} = O \Longleftrightarrow \displaystyle \sum_{i=1}^n v_ix_i = 0)
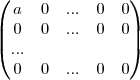 avec a = tr(A).
avec a = tr(A).
 , donc AV
, donc AV  0 : V n'est pas dans Ker(A). D'où l'idée de choisir une nouvelle base : B' = (U, e3, ... , en, V) où (U, e3, ... , en ) constitue une base de H = Ker(A). Comme
0 : V n'est pas dans Ker(A). D'où l'idée de choisir une nouvelle base : B' = (U, e3, ... , en, V) où (U, e3, ... , en ) constitue une base de H = Ker(A). Comme  , on aura :
, on aura :
 .
.
 , il faut donc trouver une autre base. Gardons U, e3, ... , en base de H et cherchons un dernier vecteur pour former une base B". Reprenons les vecteurs aj de la base canonique, nous savons que Aaj = Cj = vjU (colonne n°i de A). Or, A étant non nulle au moins une colonne est non nulle. Soit j tel que Cj non nulle. Posons B" = (U, e3 , ... , en , aj). Alors :
, il faut donc trouver une autre base. Gardons U, e3, ... , en base de H et cherchons un dernier vecteur pour former une base B". Reprenons les vecteurs aj de la base canonique, nous savons que Aaj = Cj = vjU (colonne n°i de A). Or, A étant non nulle au moins une colonne est non nulle. Soit j tel que Cj non nulle. Posons B" = (U, e3 , ... , en , aj). Alors :
 avec a = vj
avec a = vj
_{ij} = \omega^{i+j-2} \omega) étant une racine nième de l'unité non réelle. Pour cela, on remarquera que A = UtV, avec U = V =
étant une racine nième de l'unité non réelle. Pour cela, on remarquera que A = UtV, avec U = V = ) .
Publié par raymond
le
.
Publié par raymond
le
 algèbre en post-bac
algèbre en post-bac