Inscription / Connexion Nouveau Sujet
n'importe quoi !
quand on remplace un vecteur par son opposé dans un angle de vecteurs, cela ne change pas l'angle en son opposé 
ça lui ajoute pi ... !
mon raisonnement résout le problème si H est différent de 
et si ce n'est pas le cas, la relation est évidente puisque cet angle vaut soit pi/2 ; soit -pi/2
fais un dessin !
pardon :
mon raisonnement résout le problème si H est différent de
et si ce n'est pas le cas, la relation
fais un dessin !

Oui j'ai vu votre raisonnement mais je trouve ma réponse plus simple visuellement. Après le cas merci pour votre réponse vous m'avez aidé j'avais pas pensé à ça !
Si c'est plutôt
non ?
Ou sinon si k=0 :
c'est un peut ce que j'ai écrit !
mais c'est
soit tous les deux pi/2
soit tous les deux -pi/2
donc égaux modulo 2pi
AH oui on le vois sur dessin, ça dépend du sens du vecteur directeur
La question suivante qui me semble pas difficile mais ce qui me dérange c'est pourquoi on a pas introduit les modulo dès la question que je viens de résoudre. C'est quand qu'on met des modulo concernant les angles orientés.
On montrerait de même que
Montrer que
depuis le départ faut mettre des modulo 2pi ... on travaille sur des angles de vecteurs.
cette relation est quasi évidente si on sait utiliser la relation de Chasles
Merci j'ai réussi cette question en utilisant Chasles + les égalités démontrées. Je vous mets la suite si je bloque à nouveau.
4/ Montrer que
Réussi avec les triangles isocèles.
5/ Montrer que est une rotation dont on précisera le centre et l'angle.
f est la rotation de centre et d'angle
Je bloque sur la question suivante.
Soient 2 rotations de centre respectifs
et
et d'angles respectifs
et
. On suppose
1/ Déterminer 2 droites et
telles que
et
Je n'y arrive pas 
Je trouve que est la droite qui fait un angle
avec
et
Je trouve que est la droite qui fait un angle
avec
et
Ce sont des bissectrice.
Mais je ne suis pas sûr.
Perso pour ce sujet je laisse les autres contributeurs sils le veulent répondre aux "je sais pas" "je comprends pas" etc.
Jreviens si tas avancé
bonjour
Ou sinon si k=0 :
alors ça, ça vaut son pesant de cacahuètes !
bonjour
Ou sinon si k=0 :
alors ça, ça vaut son pesant de cacahuètes !
En fait j'ai fait un contresens le vecteur
Lake
Je n'ai pas compris comment vous savez que
 Pareil comment savez vous que
Pareil comment savez vous que ?
Ce n'est pas précisé dans l'énoncé
Je ne comprends pas pourquoi vous avez et
à ces endroits de la figure...
En fait je n'arrive pas à comprendre votre figure 

un scoop !
faut faire breveter !
plaisanterie mise à part, il y a d'excellents cours sur le net concernant les isométries planes et leurs composées...
Ramanujan
mais c'est toi qui les construis les droites D ... alors choisis-les intelligemment en utilisant les résultats trouvés avant ! va falloir réfléchir un peu quand même !
Lake je viens de comprendre votre schéma parfaitement, même les angles, parc contre je vois pas trop quelle est la réponse attendue ensuite.
Il suffit de dire que et
Je ne vois pas où on a utilisé la question 5
Sinon on laisse répondre futura sciences... ![]()
Un exo chez Ramanujan = +20 messages par sujet 3 forum plébiscités (maths forum, ilemaths et futura sciences, peut etre meme d'autres) ca en fait du monde pour une seule personne!
Au pire on vient tous passer le Capes à ta place!
Finalement j'ai réussi à comprendre. J'ai utilisé les questions précédentes.
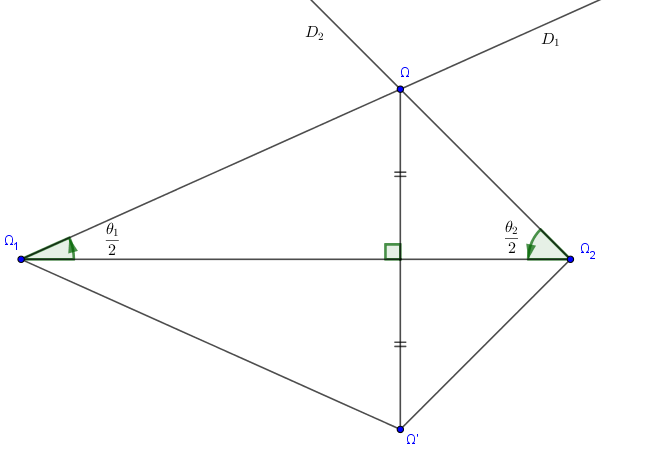
est un point fixe de la rotation
. Ainsi,
est la rotation de centre
et d'angle
Mais on veut que : donc que
Ainsi, la droite est la droite passant par
faisant un angle de
avec la droite
De même la droite est la droite passant par
faisant un angle de
avec la droite
C'est quoi (croire) faire des maths à l'heure actuelle ? ....c'est passer d'un forum les réponses obtenues vers l'autre forum et vice versa, ou trice tersa .... et se faire croire qu'on a avancé dans la solution donc la compréhension....
Ramanujan, avec tout le temps que tu passes sur ces forums, à recopier tes questions, une par une sans apparemment comprendre la globalité du travail, quand essaies-tu de résoudre vraiment tes exos et surtout d'en comprendre le sens ?
Ne peux-tu pas envisager de faire évoluer ta (non) méthode de travail ?

Oui j'ai avancé dans la compréhension. Je bloque sur certaines questions mais j'en réussis pas mal aussi.
La suite.
2/ Montrer que
J'ai fait :
Mais :
Donc :
3/ On suppose que et
sont sécantes en un point
. Montrer alors que
est une rotation dont on précisera le centre et l'angle.
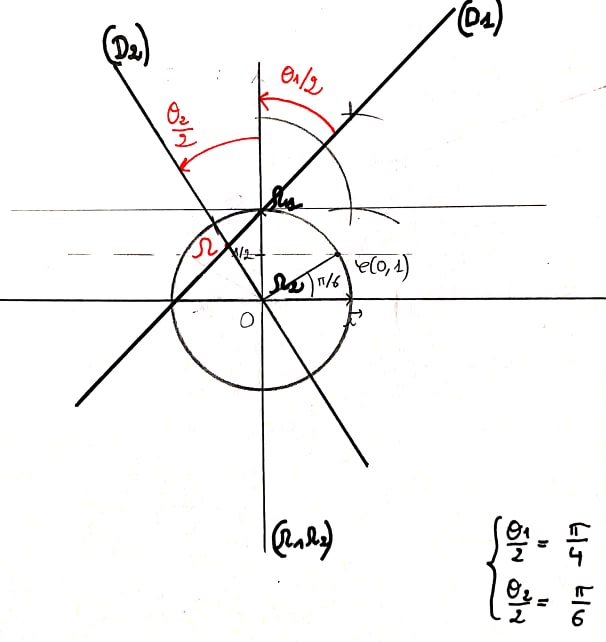
D'après les questions précédentes, est la rotation de centre
et d'angle
C'est correct ? Ça m'a l'air presque trop facile.
4/ Donner une construction à la règle et au compas du centre de la rotation lorsque
est la rotation de centre
et d'angle
et
la rotation de centre O et d'angle
J'ai fait la construction suivante :
Je bloque sur la dernière question :
5/ Que se passe t-il si et
sont parallèles ?
Personne pour la dernière question ? J'ai demandé à un prof de maths titulaire, il n'a pas trouvé la réponse.
Non mais je viens de l'étudier et de faire la démo qui est facile 
Si on suppose que avec
Les points sont alignés.
Posons : et
Alors est la translation de vecteur
Plutôt mais comme tu l'as écrit, rien n'indique que ton vecteur
est indépendant de
.
Je préfère:
Soit le projeté orthogonal de
sur
Le vecteur de la translation vaut
Tu ne dis pas qu'on est dans le cas où ; ça a tout de même son importance.
Ok merci j'ai compris en faisant un dessin, Je trouve
Mais un détail m'échappe. Ici la question est trop vague, on s'intéresse à ou
?
Je vois pas le rapport en fait, car tout le raisonnement qu'on a fait pour montrer que la composée de 2 réflexion était une rotation est basée sur le point d'intersection (point fixe) entre et
.
Pourquoi ici vous utilisez les notations de la rotation alors qu'on compose 2 réflexions ? Pourquoi on parle de ,
et
?
@Lake
Je ne trouve pas la même chose que vous. Voici mon raisonnement.
Soit et
comme précédemment.
est parallèle à
donc
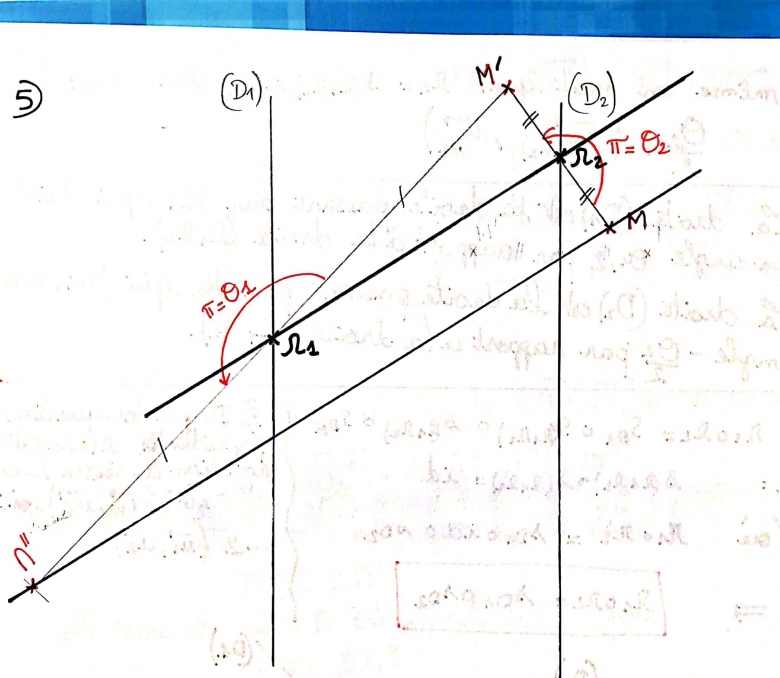
Soit un point du plan. Notons
et
On a : et
D'où :
Soit
Ainsi on a montré que si est parallèle à
alors
est la translation de vecteur
Soit
Tu prends les choses à l'envers:
Les droites
Pas du tout:
A toi de le prouver éventuellement.
Et du coup ton "raisonnement" se trouve réduit à un cas très particulier: la composition de deux symétries centrales telle qu'on peut la voir au collège avec Thalès.
Je ne vois pas le lien entre les droites et
et les angles de rotations
et
La position des droites et
dépendait de l'angle
car on avait pris
.
On a trouvé les 2 droites et
et elles passaient par
et
Du coup je ne comprends plus rien quand les centres de rotations n'appartiennent plus aux droites et
Du coup, je ne vois pas comment montrer que
Je ne comprends pas cette question en fait, on est dans quel cas ? Elle est mal posée la question, je ne vois pas ce qu'on cherche ni dans quel cas on se place.
Elle est parfaitement posée, cette question ! tu reprends la question 3 en remplaçant "on suppose que les droites sont sécantes en un point " par "on suppose les droites parallèles"
Je n'arrive toujours pas à comprendre, toutes les questions utilisent que D1 et D2 s'intersectent en un point. Comment voulez vous partir de la questionn 3 alors que pour démontrer 1 et 2 on a utilisé les résultats précédents qui sont dans le cas ou D1 et D2 se coupent.
Bref, je ne comprends strictement rien à ce question ni au raisonnement de Lake.
tu nous as donné ton énoncé par bribes, on passe de la question 6 à la question 2, comment veux-tu comprendre quelque chose quand tu es aussi fouillis ?
tu n'as sans doute pas remarqué qu'il y avait des I, II, III, IV ? et que les trucs sur les droites sécantes étaient dans d'autres parties ...

 géométrie en post-bac
géométrie en post-bac