Inscription / Connexion Nouveau Sujet
Calcul d'angle
Bonsoir à tous,
Pour illustrer la modélisation géométrique inverse d'un robot à deux degrés de liberté (robotique pour la mécatronique), mon prof a utilisé un exemple, que je n'arrive pas à comprendre.
L'objectif est de déterminé l'angle Q2.
Sans explication, il montre que :
Pouvez-vous m'expliquer de quelle façon il arrive à ça ?
Je vous remercie d'avance.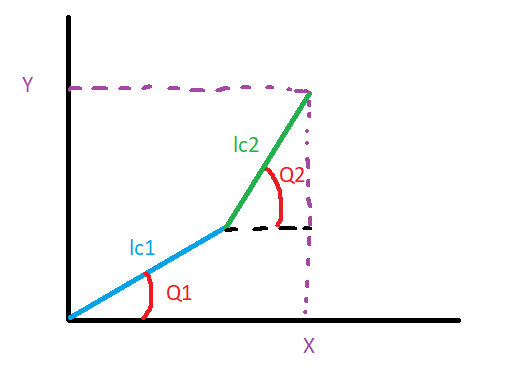
* Modération > Image recadrée pour éviter du vide à la fin du message  *
*
salut
dommage de ne pas nous avoir mis des points aux extrémités des segments ...
il a simplement calculé un produit scalaire selon la formule
Bonsoir,
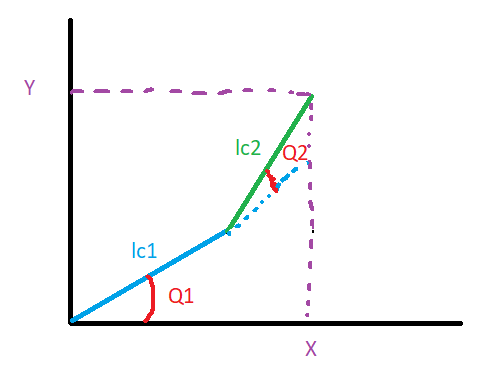
M'est avis que tu t'es trompé dans ton croquis, et que n'est pas l'angle que tu indiques mais l'angle entre le prolongement de la première barre et la deuxième barre.
Le mot clé est alors : Al Kashi
Merci pour vos réponses.
Je n'ai toujours pas trouvé. Pour vous répondre :
Bonsoir,
M'est avis que tu t'es trompé dans ton croquis, et que
Le mot clé est alors : Al Kashi
Oui, c'est une erreur de ma part.
Bonjour,
Ecris ce que vaut cosQ2
Je voulais utiliser les formules de trigo (soh cah toa), mais comme je n'ai pas un triangle rectangle pour l'angle Q2, je pense que ça va être difficile

salut
dommage de ne pas nous avoir mis des points aux extrémités des segments ...
il a simplement calculé un produit scalaire selon la formule
J'ai essayé, mais je ne trouve pas le bon résultat. Voici ce que j'ai fait :
Voila voila

Une autre idée m'est venu et peut-être plus simple
 Et elle rejoint un peu l'idée de GBZM
Et elle rejoint un peu l'idée de GBZM
On sait que (résultat prof) :
(1) :
Avec pour objectif de trouver Q2 tel que :
(1)
Et la je reste perplexe et je suis découragé pour trouver seulement cos(q2)

Je pense que c'est la méthode qu'a utilisé mon prof
il suffit de prendre pour u le vecteur représenté par le segment lc1 et pour v le vecteur représenté par le segment lc2 ...
Rassure-moi ... Al Kashi, tu connais, n'est-ce pas ?
Et le triangle dans lequel l'appliquer, il s'impose de lui-même ...
Rassure-moi ... Al Kashi, tu connais, n'est-ce pas ?
Et le triangle dans lequel l'appliquer, il s'impose de lui-même ...
Le nom seulement
J'avais oublié son concept. J'ai compris. Merci.
il suffit de prendre pour u le vecteur représenté par le segment lc1 et pour v le vecteur représenté par le segment lc2 ...
Oui. Je ne sais pas ce que j'ai fait tout à l'heure

Merci à vous deux


 trigonométrie en post-bac
trigonométrie en post-bac