Inscription / Connexion Nouveau Sujet
c'est un peu violences faites à des mouches, là, non ? on est en dimension finie, la même au départ et à l'arrivée, du coup pour une application linéaire surjectif, injectif ou bijectif, c'est kif-kif !

Oui vous avez raison !
Ensuite faut montrer que
Je dirais comme : alors
On peut appliquer à l'inclusion :
Or f est bijective donc :
D'où :
Maintenant montre linjectivité sans passer par un raisonnement par dimension ca sera formateur..
Quasi le meme raisonnement quavant
D'après le cours dimension finie + même espace d'arrivée et de départ = bijectif
Pour justifier que je voulais savoir si ce que j'ai fait est le raisonnement attendu ou si vous feriez autrement.
car
Or par hypothèse :
Donc
Comme alors :
Pourquoi faire simple quand on peut faire compliqué, hein ?
C'est trop simple de remarquer que e1 et e2 sont éléments de Z2? Et donc images par f d' éléments de Z2 donc de R2?
@Lafol
En effet 
Par contre j'ai pas réussi à montrer que :
Faut que je prenne un élément de
et que je montre que
Par contre je vois pas le rapport entre cet élément et les coefficients de la matrice
Oui la première colonne de A représente les coordonnées de dans la base canonique
et la deuxième colonne les coordonnées de
toujours dans la base canonique.
Ce raisonnement est-il correct ?
x est un vecteur de et la base canonique est une
base de
d'après la première question donc il existe
tel que
Montrons que
Donc :
Les 2 coordonnées de sont à coordonnées entières donc
Salut Ramanujan.
J'ai tapé un corrigé pour les parties A et B.
Si tu le veux envoie moi un mail, il y a mon adresse dans mon profil.
Ramanujan tout ton premier paragraphe est hors sujet
Remplace par
Soit X = (a,b) = ae1 + be2 Z2 alors...
Ramanujan tout ton premier paragraphe est hors sujet
Remplace par
Soit X = (a,b) = ae1 + be2 Z2 alors...
Ah d'accord merci vous avez raison c'est inutile vu qu'on part de : soit
J'ai une question je trouve pas l'info sur internet.
Soit A un ensemble, une application et
sa réciproque.
A t-on : ?
Bah ici est une bijection. Mais dans les cours ils disent de pas confondre application réciproque et bijection réciproque.
Pour une application quelconque je sais que ça marche pas, y a des inclusion selon que ce soit injectif ou bijectif. Oui je sais faut que je reçoive mon cours de MPSI, j'attends mon livre comme ça je douterais plus sur des cas comme ça.
Si est une bijection de E sur F, et
sa réciproque de F sur E, alors
. Du coup ton égalité est vrai pour toute partie A de E...
 (et quand elle l'est elle vérifie ce que j'ai dit)
(et quand elle l'est elle vérifie ce que j'ai dit)Bah ici
Pour une application quelconque je sais que ça marche pas, y a des inclusion selon que ce soit injectif ou bijectif. Oui je sais faut que je reçoive mon cours de MPSI, j'attends mon livre comme ça je douterais plus sur des cas comme ça.
Si
D'accord merci
On suppose dans cette question que les coefficients de sont des entiers relatifs et que
J'ai montré que est une
base de
.
En déduire que :
On a déjà montré que
J'ai des difficultés pour montrer que :
Soit alors comme
est une
base de
alors :
Et là je bloque.

Ah je viens de comprendre !
J'avais pas compris ce que veut dire :
Il faut juste prendre et trouver un
tel que
Du coup il suffit de prendre :
En effet 
J'en suis à la partie C.
Soit l'ensemble des isométries affines
de
telles que
et soit
l'ensemble des éléments de
de
tel que
Montrer que muni de la loi de composition des applications est un groupe.
Je vois pas comment partir je sais juste qu'une isométrie affine est une application d'un espace dans lui même et qu'elle conserve les distances.
Tu fais la liste de tout ce que tu dois montrer et tu pars de ce que tu sais : à savoir quune isométrie doit vérifier
C'est la même chose que : ?
Sauf qu'ici c'est des points et vous utilisez la notation vectorielle ? J'ai du mal à comprendre la différence entre isométrie affine et une isométrie vectorielle ?
En fait je me demande si on peut passer par sous groupe car on sait que l'ensemble des isométrie est un sous groupe ? Car ici G est l'ensemble des isométries qui vérifient
Bonjour !
Comme souvent tu te noies dans un verre d'eau !
Tu dois juste établir (pour obtenir un sous-groupe du groupe des applications affines) que
1.
2. .
(A tout hasard je te signale qu'une isométrie est bijective et que la composée de deux isométries en est encore une !)
D'accord merci.
Montrons que est un sous-groupe de l'ensemble des isométries de
.
1/ n'est pas vide : l'application identité est une isométrie affine et elle vérifie
donc elle appartient à
2/ Si alors
est une isométrie qui vérifie
est une isométrie affine d'après le cours.
On a : donc
Comme une isométrie est bijective alors :
Donc on a :
On a montré :
Soient alors
est une isométrie et comme
Donc :
On a montré que est un sous groupe du groupe des isométries affines c'est donc un groupe.
J'en suis à la question suivante.
Déterminer tous les points de
situés à la distance 1 de
.
Dans la distance utilisée est la norme 2 ?
Si on pose :
Après il suffit de vérifier :
Bonsoir,
Quand il n'y a pas de précision on utilise la distance euclidienne ( norme 2 ).
Pour la question, je ne crois pas que l'on demande une démonstration.
Juste une liste, avec éventuellement un croquis, devrait suffire.
Une petite correction :
D'accord
Il faut trouver les points à coordonnées entières qui vérifient :
[. . .]
Je bloque sur la question suivante : désigne l'ensemble des isométries f affines de
tel que
et tel que
Soit et f une application linéaire bijective. Montrer que
appartiennent à l'ensemble :
J'arrive pas à faire le lien géométrique entre et
On connait les vecteurs de qui sont à une distance
de l'origine O.
Mais après je vois pas.
Je vois pas où utiliser
On sait que : où X sont les vecteurs à distance de 1 de O.
Comment calculer en fonction de X ?
Ah si je crois avoir trouvé :
Comme :
alors
donc
peut être les 4 vecteurs trouvés à la question précédente car ils sont de norme 1.
alors
donc
peut être les 4 vecteurs trouvés à la question précédente car ils sont de norme 1.
Et j'ai oublié d'après la partie précédente comme alors
sont des entiers de norme 1 d'où la solution.
Soit et
les applications linéaires de matrices respectives dans la base canonique :
Décrire la nature géométrique de et
Je connais que les matrices de rotation. Mais ça ne semble pas en être une. Du coup je sais pas comment faire.
Bonsoir !
T'as vraiment besoin d'une nounou pour te dire de faire un dessin et regarder les images des vecteurs de la base canonique ?
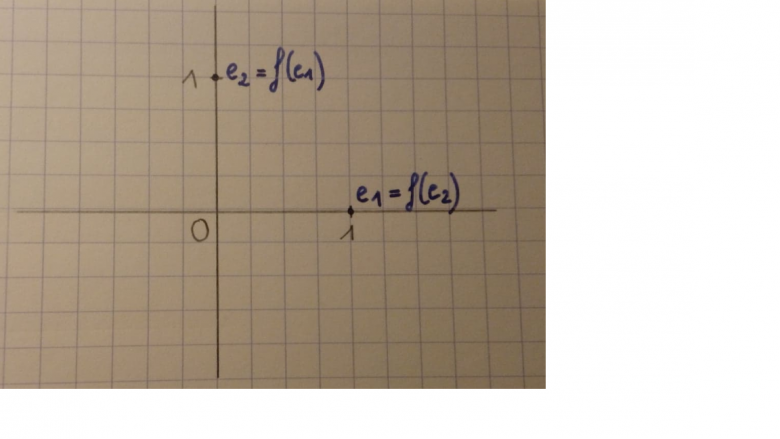

Je dirais avec Pythagore et Thalès on démontre facilement que y=x est la médiatrice du segment donc c'est bien la symétrie orthogonale d'axe y=x.

 algèbre en post-bac
algèbre en post-bac